

Journal list menu
 Issue
IssueInternational Journal of Robust and Nonlinear Control: Volume 30, Issue 5
i, 1733-212925 March 2020
Export Citations
Download PDFs
COVER IMAGE
Cover Image
- Page: i
- First Published: 19 February 2020

The cover image is based on the Research Article Consensus control of output-constrained multi-agent systems with unknown control directions under a directed graph by Gang Wang et al., https://doi.org/10.1002/rnc.4852.
ISSUE INFORMATION
RESEARCH ARTICLES
Finite-time robust simultaneous stabilization of a set of nonlinear time-delay systems
- Pages: 1733-1753
- First Published: 28 December 2019
Resilient filtering for cyber-physical systems under denial-of-service attacks
- Pages: 1754-1769
- First Published: 10 December 2019
State-limiting PID controller for a class of nonlinear systems with constant uncertainties
- Pages: 1770-1787
- First Published: 17 December 2019
Output feedback stabilization for nonholonomic systems with unknown unmeasured states-dependent growth
- Pages: 1788-1801
- First Published: 06 January 2020
Consensus control of output-constrained multiagent systems with unknown control directions under a directed graph
- Pages: 1802-1818
- First Published: 03 January 2020
Output-feedback stabilization for planar output-constrained switched nonlinear systems
- Pages: 1819-1830
- First Published: 03 January 2020
Event-triggered finite-time reliable control for nonhomogeneous Markovian jump systems
- Pages: 1831-1849
- First Published: 27 December 2019
Orbital stabilization of nonlinear systems via the immersion and invariance technique
- Pages: 1850-1871
- First Published: 20 December 2019
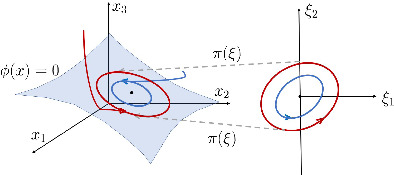
The paper shows that the immersion and invariance (I&I) technique, which is widely popular for stabilization,state estimation, and adaptive control of nonlinear systems, can be used for orbital stabilization. As usual with the I&I method, a large flexibility exists in the election of target dynamics and the definition of the manifold that is rendered attractive and invariant, which can be exploited to simplify the controller design. The feasibility of the proposed method is illustrated with some classical mechanical and power electronics systems.
Tracking and load sway reduction for double-pendulum rotary cranes using adaptive nonlinear control approach
- Pages: 1872-1885
- First Published: 13 December 2019
An
 interval observer for uncertain continuous-time linear systems
interval observer for uncertain continuous-time linear systems
- Pages: 1886-1902
- First Published: 12 December 2019
Finite-time attitude-tracking control for rigid spacecraft with actuator failures and saturation constraints
- Pages: 1903-1937
- First Published: 23 December 2019
Output sign-consensus of heterogeneous multiagent systems over fixed and switching signed graphs
- Pages: 1938-1955
- First Published: 25 December 2019
Strictly dissipative stabilization of multiple-memory Markov jump systems with general transition rates: A novel event-triggered control strategy
- Pages: 1956-1978
- First Published: 07 January 2020
Design proportional-integral-derivative/proportional-derivative controls for second-order time-varying switched nonlinear systems
- Pages: 1979-2000
- First Published: 17 December 2019
Stochastic robust finite-time boundedness for semi-Markov jump uncertain neutral-type neural networks with mixed time-varying delays via a generalized reciprocally convex combination inequality
- Pages: 2001-2019
- First Published: 27 December 2019
Neural critic learning toward robust dynamic stabilization
- Pages: 2020-2032
- First Published: 18 December 2019
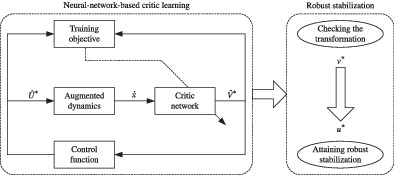
With the help of dynamics decomposition and combination, the critic-learning-based robust stabilization in the presence of disturbed terms in both the internal dynamics and the input matrix has been attained. The critic weight can be initialized to be zero, in order to facilitate the learning activity of the involved neural control design. The application scope of the neural critic learning method is broadened to more general uncertain dynamics while the adaptive critic implementation of the weight training process is simplified in this article.
Hyperbolic-singular-value-decomposition-based square-root accurate continuous-discrete extended-unscented Kalman filters for estimating continuous-time stochastic models with discrete measurements
- Pages: 2033-2058
- First Published: 29 December 2019
Adaptive optimal dynamic surface control of strict-feedback nonlinear systems with output constraints
- Pages: 2059-2078
- First Published: 23 December 2019
Consensus of multiagent systems with random switching topologies and its application
- Pages: 2079-2096
- First Published: 23 December 2019
Robust feedback stabilization using high-gain observer via event triggering
- Pages: 2097-2112
- First Published: 24 January 2020
Descriptor state-bounding observer design for positive Markov jump linear systems with sensor faults: Simultaneous state and faults estimation
- Pages: 2113-2129
- First Published: 09 January 2020
Sign up for email alerts
Tools
More from this journal
Related Titles
 IssueVolume 39, Issue 7
IssueVolume 39, Issue 7Special Issue: AI and Machine Learning for Control Applications
1361-1607July 2025Guest Editor(s):
Jiusun Zeng, Shaohan Chen, Xiaoyu Zhang, Chuanhou Gao
