

Journal list menu
 Issue
IssueInternational Journal of Robust and Nonlinear Control: Volume 30, Issue 4
i, 1329-173210 March 2020
Export Citations
Download PDFs
COVER IMAGE
Free Access
free
Cover Image
- Page: i
- First Published: 17 February 2020
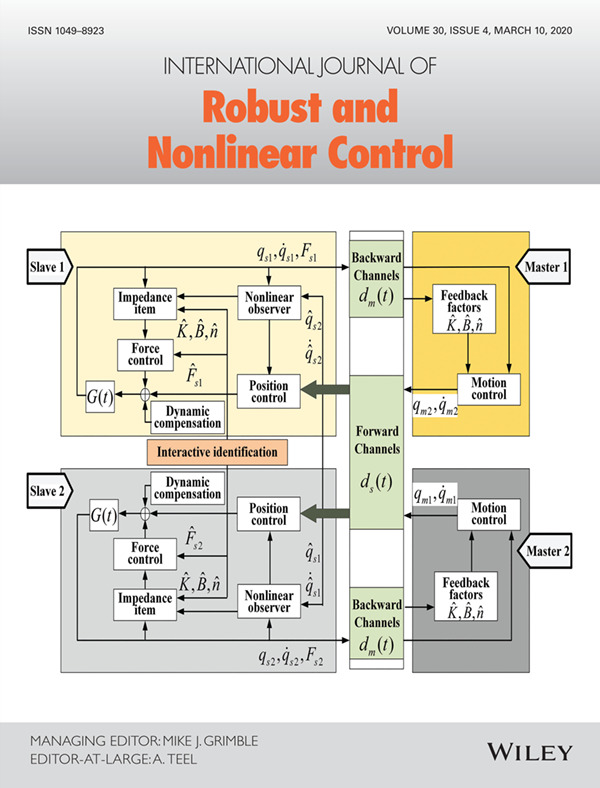
The cover image is based on the Research Article High-gain nonlinear observer-based impedance control for deformable object cooperative teleoperation with nonlinear contact model by Zhenyu Lu et al., https://doi.org/10.1002/rnc.4880.
ISSUE INFORMATION
RESEARCH ARTICLES
no
High-gain nonlinear observer-based impedance control for deformable object cooperative teleoperation with nonlinear contact model
- Pages: 1329-1350
- First Published: 10 January 2020
no
Adaptive parameter estimation for a general dynamical system with unknown states
- Pages: 1351-1372
- First Published: 02 January 2020
no
Recursive parameter estimation methods and convergence analysis for a special class of nonlinear systems
- Pages: 1373-1393
- First Published: 28 December 2019
no
Dynamic output-feedback fuzzy MPC for Takagi-Sugeno fuzzy systems under event-triggering–based try-once-discard protocol
- Pages: 1394-1416
- First Published: 18 December 2019
no
Finite-time H∞ bumpless transfer control for switched systems: A state-dependent switching approach
- Pages: 1417-1430
- First Published: 20 December 2019
no
Control performance-based fault detection and fault-tolerant control schemes for a class of nonlinear systems
- Pages: 1431-1450
- First Published: 16 December 2019
no
Decentralized event-triggered control of large-scale nonlinear systems
- Pages: 1451-1466
- First Published: 12 December 2019
no
Sliding mode control of discrete-time switched systems subject to mode delays
- Pages: 1467-1486
- First Published: 19 December 2019
no
Adaptive consensus control for stochastic nonlinear multiagent systems with full state constraints
- Pages: 1487-1511
- First Published: 13 December 2019
no
An observer-based output feedback robust MPC approach for constrained LPV systems with bounded disturbance and noise
- Pages: 1512-1533
- First Published: 18 December 2019
no
Resilient control of networked control systems under deception attacks: A memory-event-triggered communication scheme
- Pages: 1534-1548
- First Published: 09 December 2019
no
Stability analysis on networked control systems under double attacks with predictive control
- Pages: 1549-1563
- First Published: 18 December 2019
no
Asynchronous fault detection observer design for discrete-time piecewise linear systems
- Pages: 1564-1581
- First Published: 18 December 2019
no
Tracking and parameter identification for model reference adaptive control
- Pages: 1582-1606
- First Published: 19 December 2019
no
Nonlinear control of three-dimensional underactuated vehicles
- Pages: 1607-1621
- First Published: 06 December 2019
no
Reliable control design for composite-driven scheme based on delay networked T-S fuzzy system
- Pages: 1622-1642
- First Published: 19 December 2019
no
Multigradient recursive reinforcement learning NN control for affine nonlinear systems with unmodeled dynamics
- Pages: 1643-1663
- First Published: 19 December 2019
no
Stabilization and second-order optimization for multimodule impulsive switched linear systems
- Pages: 1664-1678
- First Published: 17 December 2019
no
Stabilization of switched nonlinear systems with dynamic output quantization and disturbances
- Pages: 1679-1695
- First Published: 07 January 2020
no
Feedback passification of switched stochastic time-delay systems with multiple disturbances via DOBC
- Pages: 1696-1718
- First Published: 19 December 2019
no
Sum-of-squares–based consensus verification for directed networks with nonlinear protocols
- Pages: 1719-1732
- First Published: 30 December 2019
Sign up for email alerts
Tools
More from this journal
Related Titles
 IssueVolume 39, Issue 7
IssueVolume 39, Issue 7Special Issue: AI and Machine Learning for Control Applications
1361-1607July 2025Guest Editor(s):
Jiusun Zeng, Shaohan Chen, Xiaoyu Zhang, Chuanhou Gao
