

Journal list menu
 Issue
IssueOptimal Control Applications and Methods: Volume 46, Issue 4
1355-1863July/August 2025
Export Citations
Download PDFs
ISSUE INFORMATION
GUEST EDITORIAL
Optimal Control of Sediment Deposition in Shallow Waters
- Pages: 1357-1372
- First Published: 03 March 2025
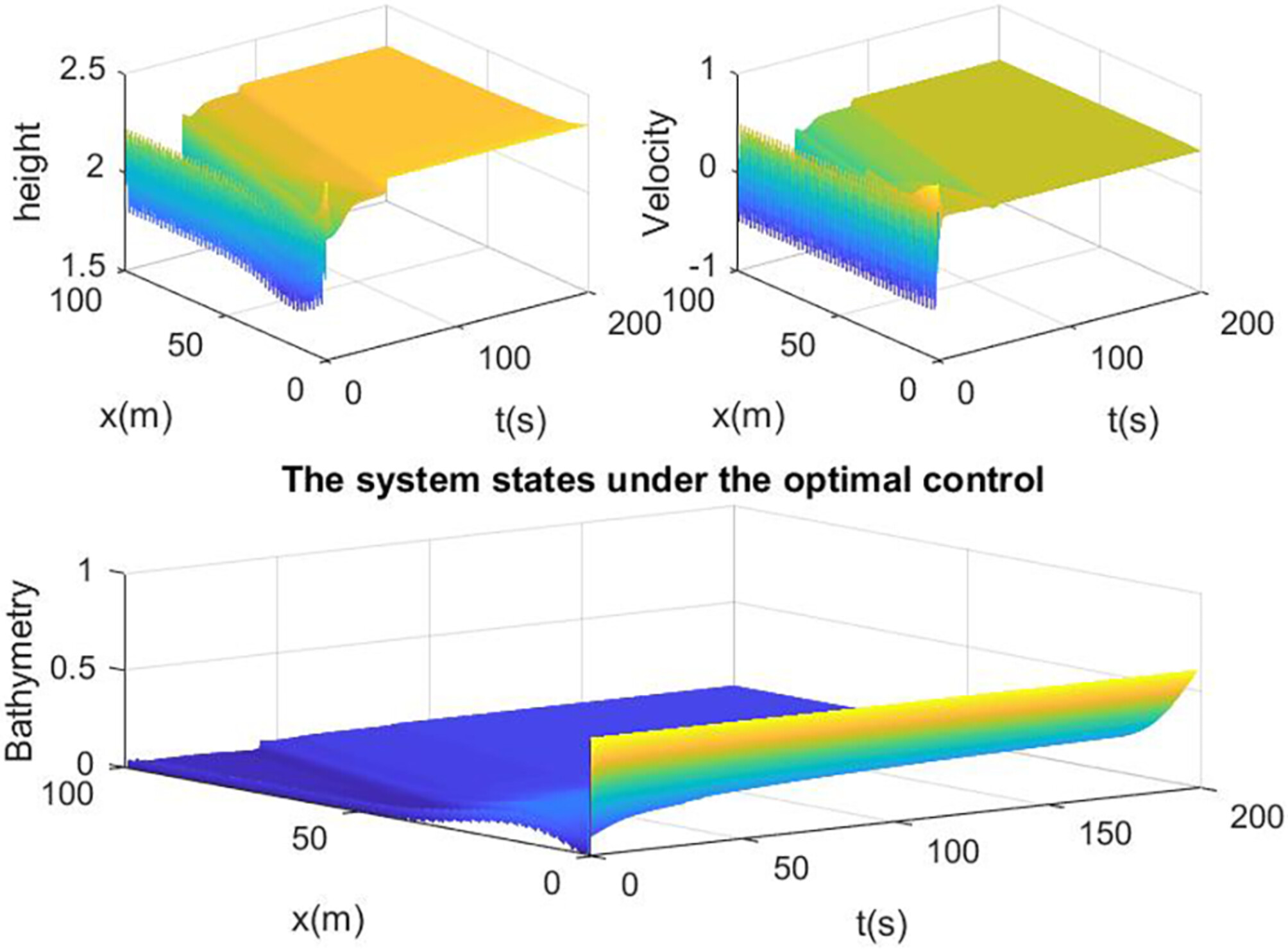
In the context of an optimal control analysis of sediment transport, an initial bed profile for a rectangular channel that reduces sediment deposition while ensuring the stability of velocity and water depths has been identified. This optimization effectively balances the reduction of sediment accumulation and the maintenance of stable hydrodynamic conditions.
RESEARCH ARTICLE
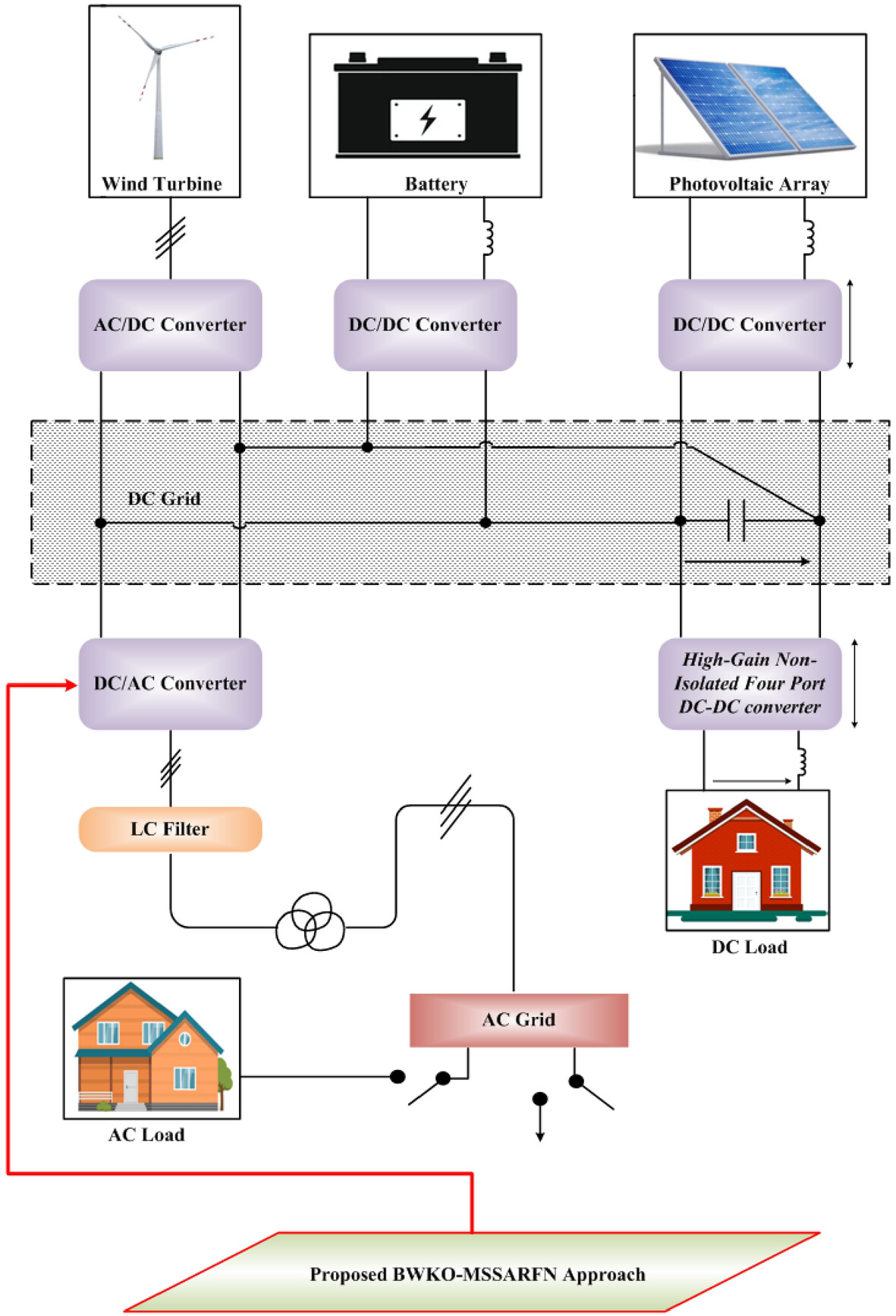
Energy Management Framework for Renewable Energy Utilization and Power Quality Optimization in DC Microgrids
- Pages: 1373-1387
- First Published: 04 June 2025
A Nash Differential Game Approach in Observer-Based LQR Controller Design
- Pages: 1388-1401
- First Published: 29 March 2025
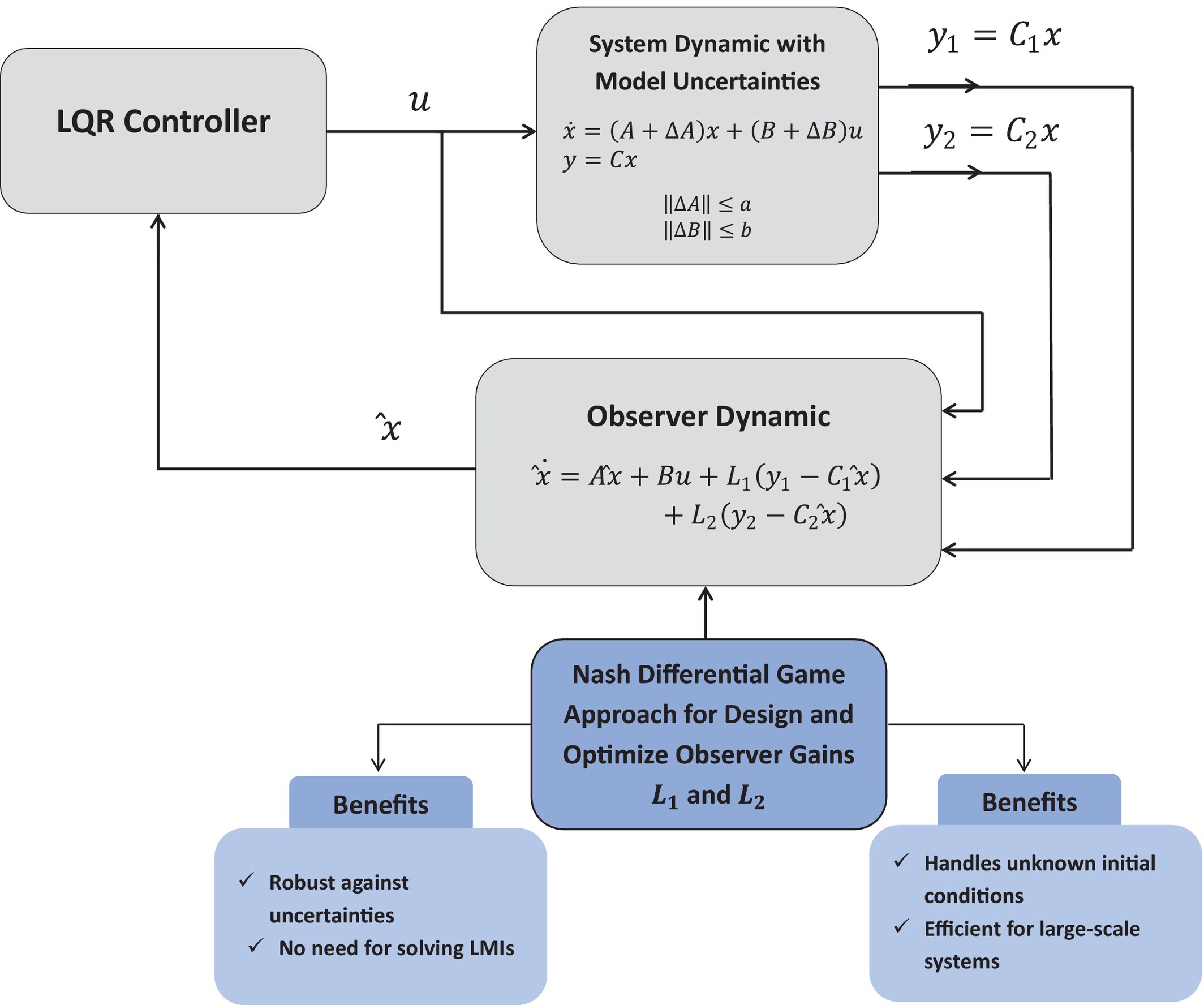
This paper presents an observer-based optimal LQR controller utilizing a Nash differential game approach for design and optimize the observer gains. The proposed method addresses systems with unknown model uncertainties by formulating the problem within a differential game framework. An observer is designed to estimate the system states while ensuring robustness against uncertainties, eliminating the need for solving Linear Matrix Inequalities (LMIs). The control strategy is derived using an optimal LQR approach via utilizing the proposed observer. This method effectively handles unknown initial conditions, enhances system performance, and provides a more resilient estimation and control framework.
Fast Point-To-Point Transportation of the Portal Crane via Double-Input Inversion-Based Feedforward and Feedback Control
- Pages: 1402-1416
- First Published: 09 February 2025
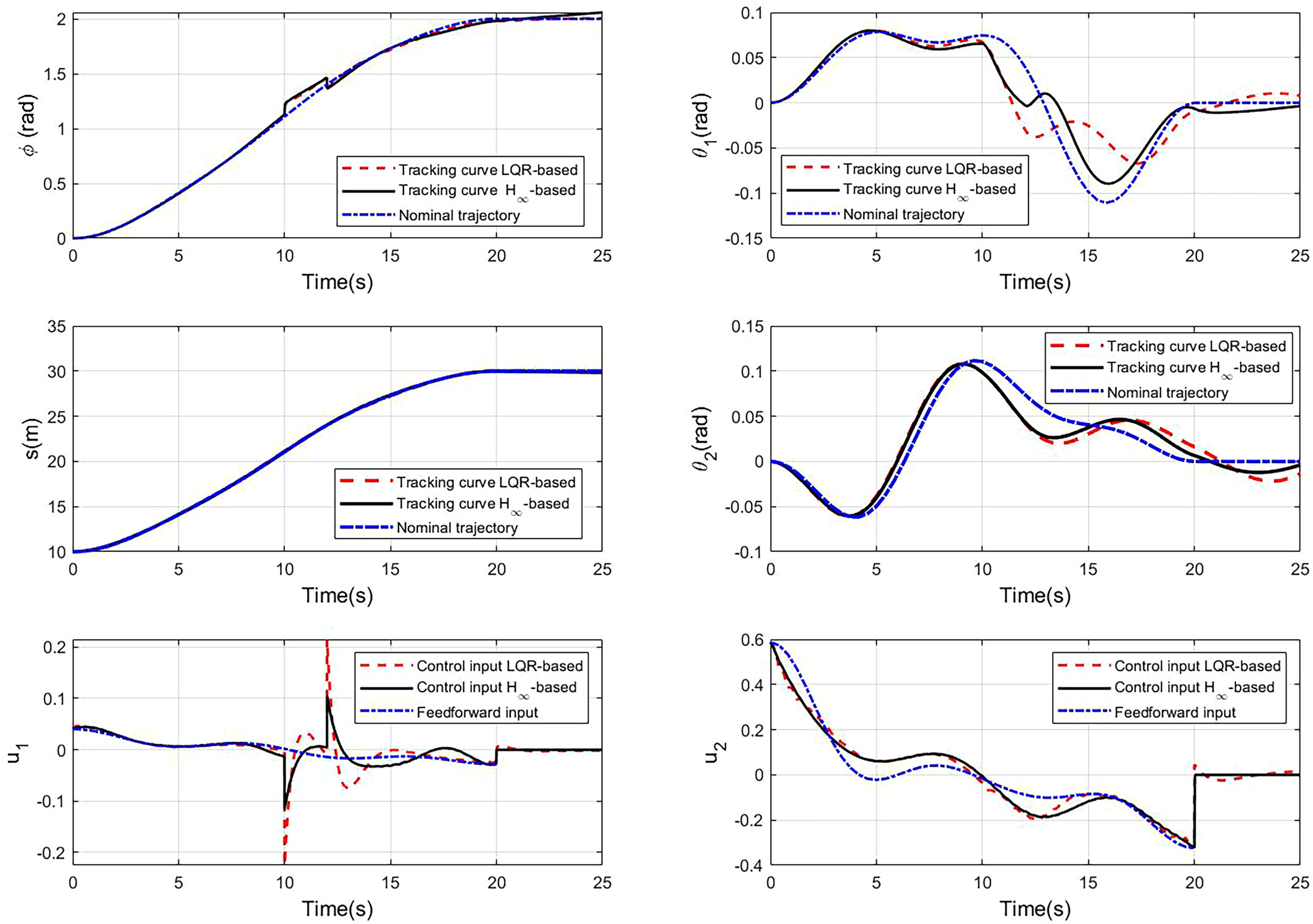
The simulated curves of trajectory tracking and stability control with a external disturbance on the output of φ.
Guidance for Hypersonic Reentry Using Nonlinear Model Predictive Control and Radau Pseudospectral Method
- Pages: 1417-1428
- First Published: 05 March 2025
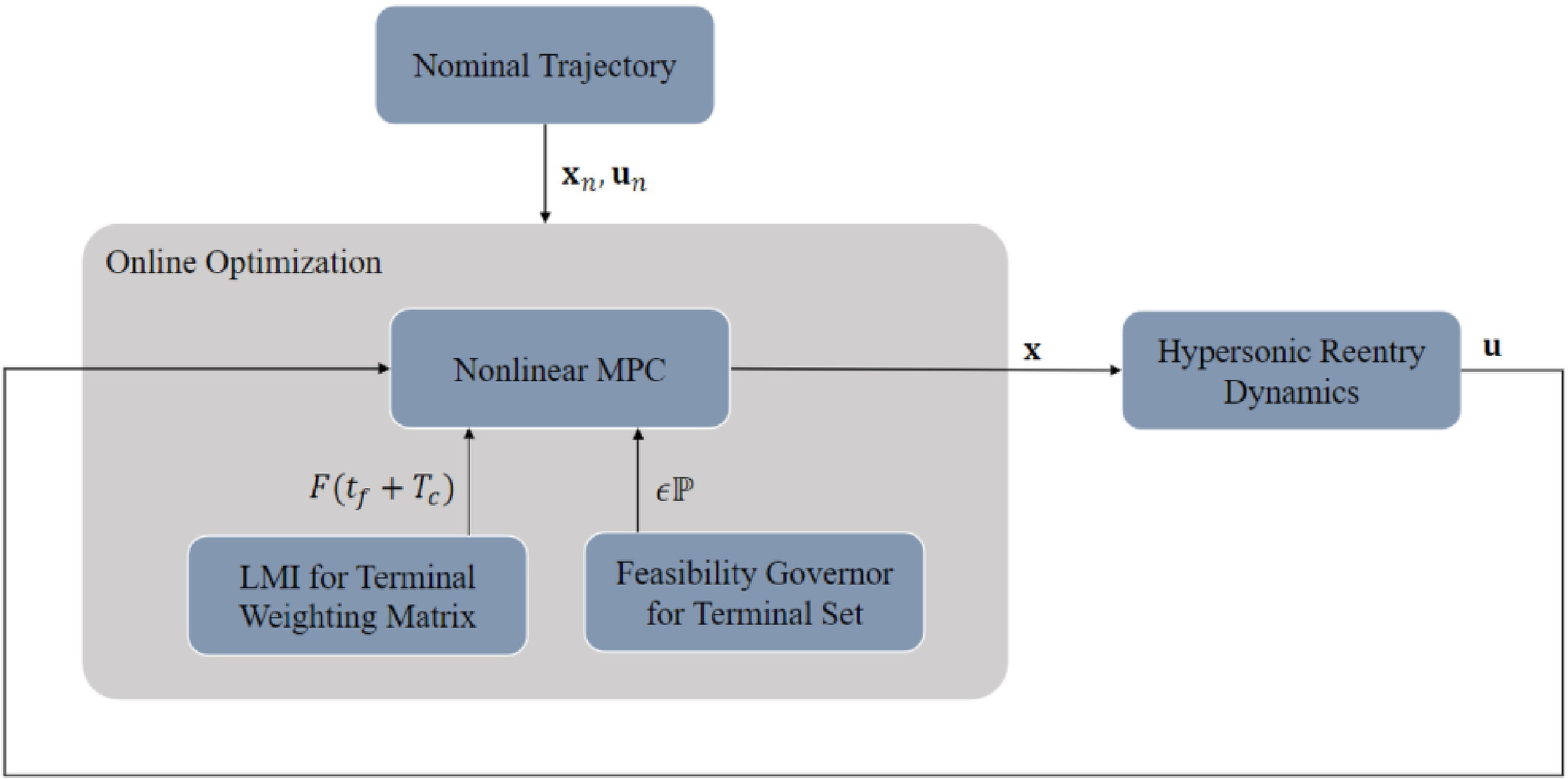
A continuous nonlinear model predictive control (NMPC) framework is developed for hypersonic reentry vehicles to track the nominal trajectory. Implementability is improved through integration of a feasibility governor for terminal set constraints and linear matrix inequality (LMI) for terminal costs.
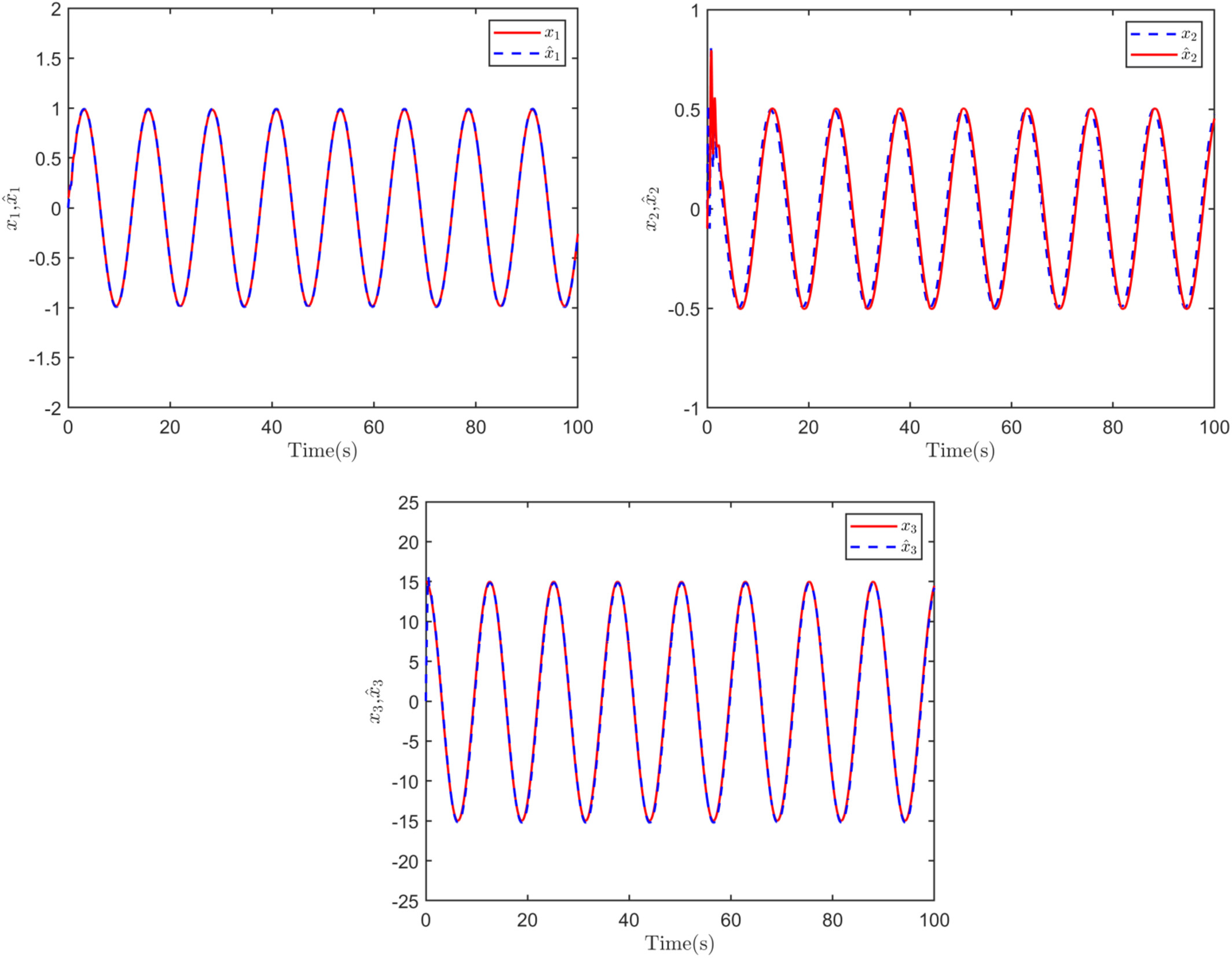
Fixed-Time ESO-Based Reinforcement Learning for Manipulator Time-Delay System
- Pages: 1429-1448
- First Published: 26 February 2025
Cooperative Tracking Control of Multiple Autonomous Underwater Vehicles With Markovian Jumping Switching Topologies and Communication Delays
- Pages: 1449-1458
- First Published: 12 March 2025
Optimal Adaptive Back-Stepping SMC Synthesis via the Fuzzy Model: Applications to a Two-Degree-of-Freedom Helicopter System
- Pages: 1459-1469
- First Published: 26 February 2025
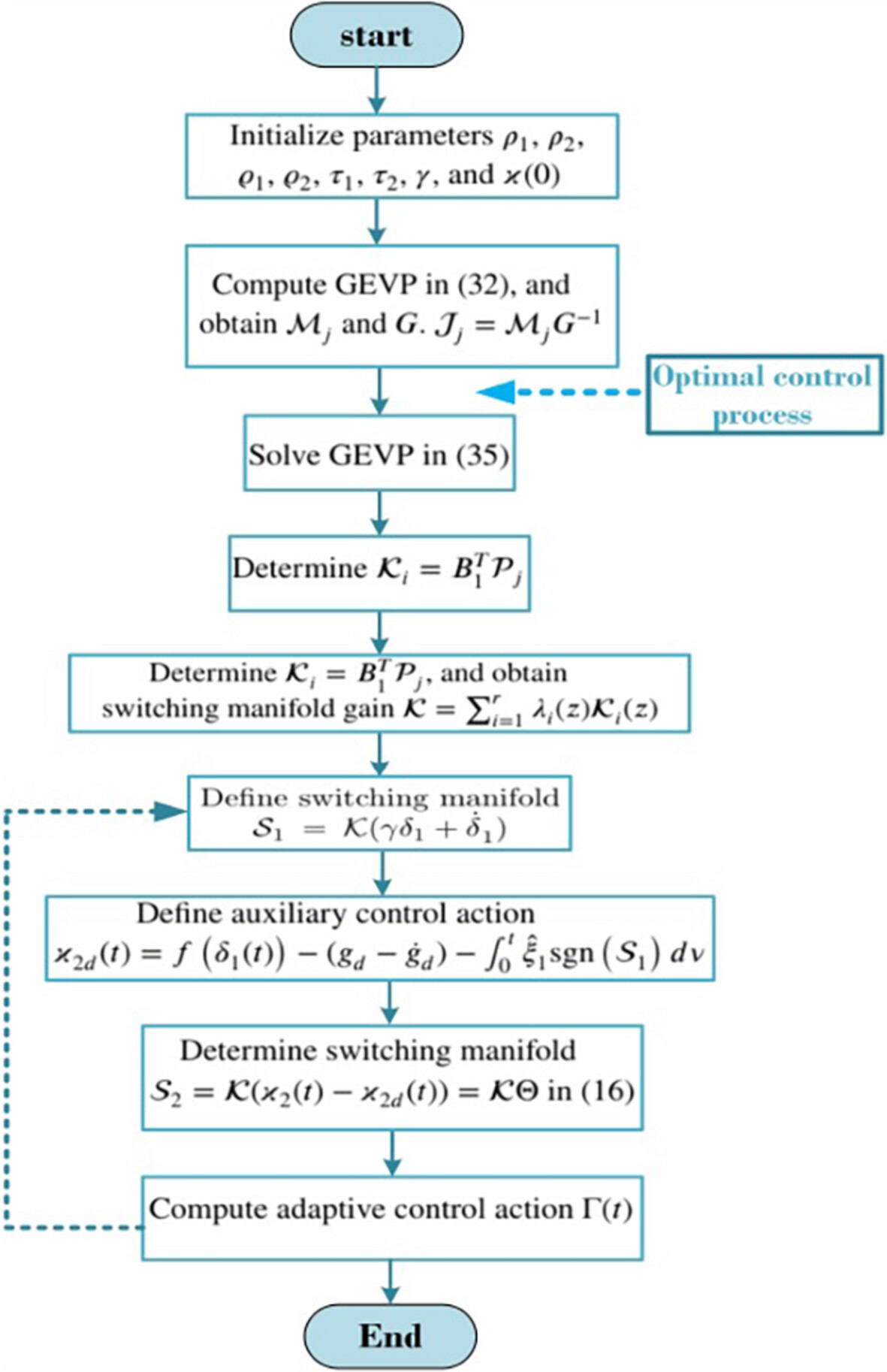
Optimal Adaptive Back-Stepping SMC via TS Fuzzy Model for Uncertain Nonlinear Systems.
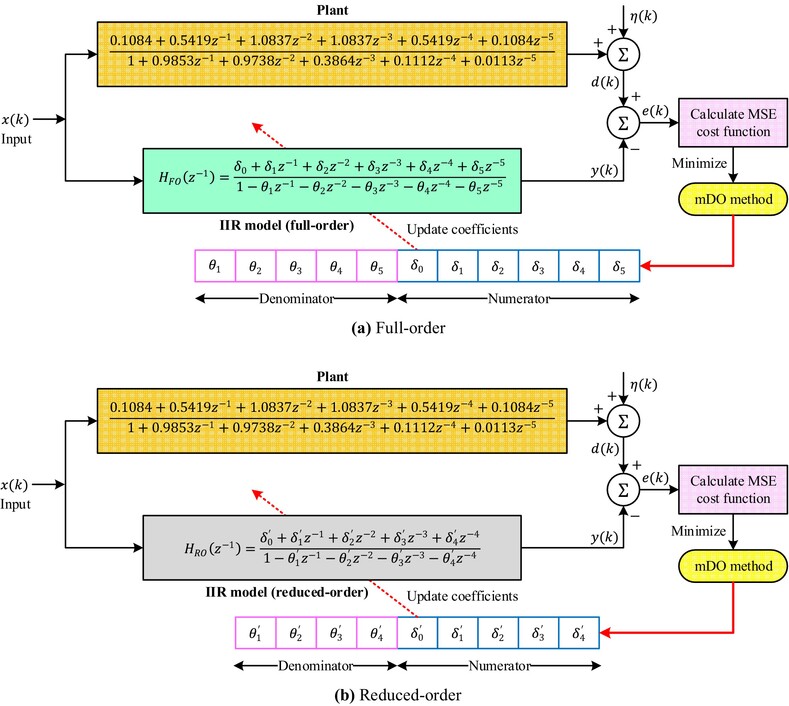
Efficient Optimization of Engineering Problems With A Particular Focus on High-Order IIR Modeling for System Identification Using Modified Dandelion Optimizer
- Pages: 1470-1510
- First Published: 24 February 2025
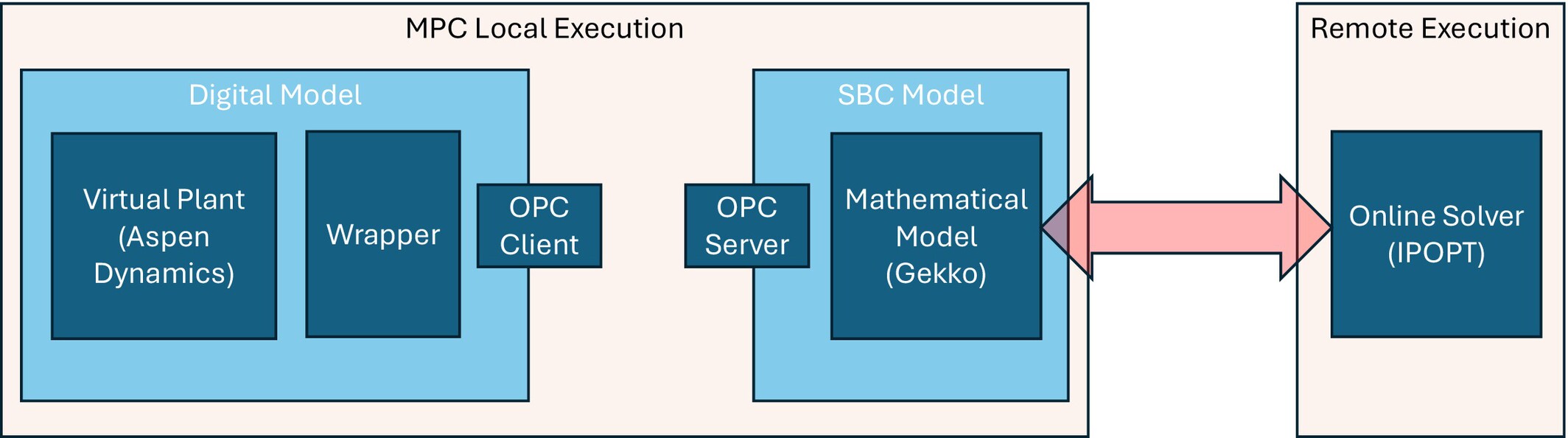
Computational Performance of a Remote Nonlinear Predictive Controller on a Single Board Computer Applied to a Distillation Process
- Pages: 1511-1527
- First Published: 14 March 2025
Investigating Mild Solution and Optimal Control Results for Fractional-Order Semilinear Control System via Resolvent Operators
- Pages: 1528-1537
- First Published: 11 March 2025
This study explores the existence of mild solutions and optimal control strategies for fractional-order semilinear control systems using resolvent operators. By leveraging advanced mathematical tools such as Banach's Fixed Point Theorem, Gronwall's Inequality, and semigroup theory, we establish sufficient conditions for solution uniqueness. The findings contribute to the theoretical and practical advancements in control theory, with applications spanning engineering, biological models, and other scientific disciplines.
Sensitivity-Based Distributed Model Predictive Control for Non-Linear Systems Under Inexact Optimization
- Pages: 1538-1558
- First Published: 24 March 2025
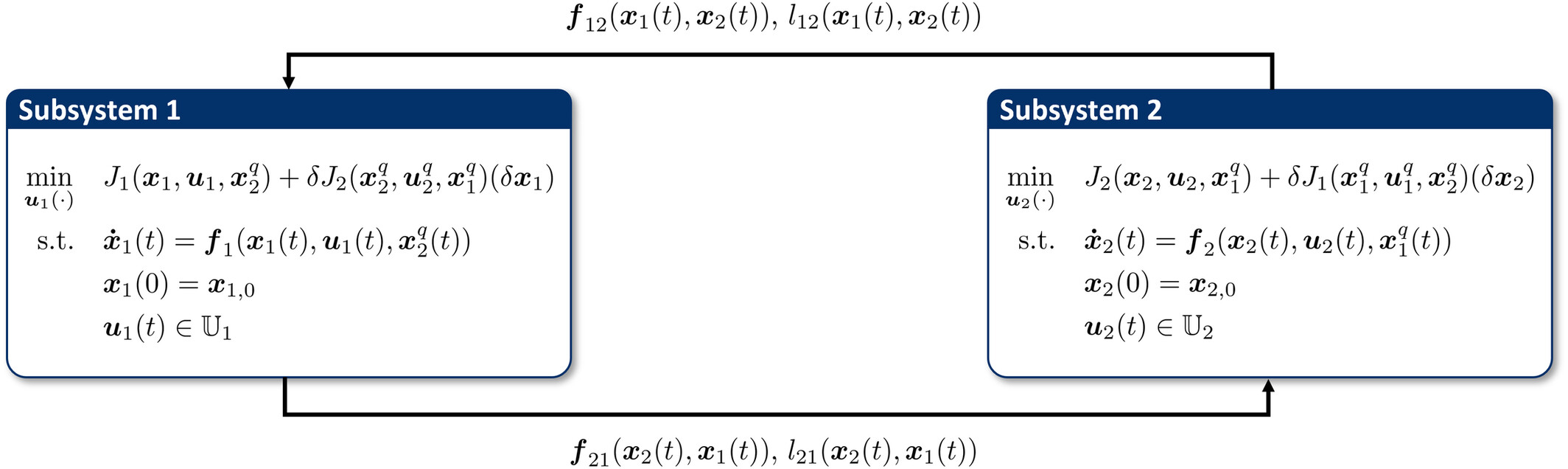
This article introduces a novel sensitivity-based algorithm for nonlinear distributed model predictive control. The algorithm requires only local computations with one neighbor-to-neighbor communication step per iteration and exhibits a linear order of convergence under suitable conditions. Based on this result, stability for the model predictive control scheme with a fixed number of algorithm iterations is shown which is critical for real-time applications.
Adaptive Fuzzy Inverse Optimal Control for Uncertain Switched Nonlinear Systems With Mismatched Disturbance
- Pages: 1559-1568
- First Published: 13 March 2025
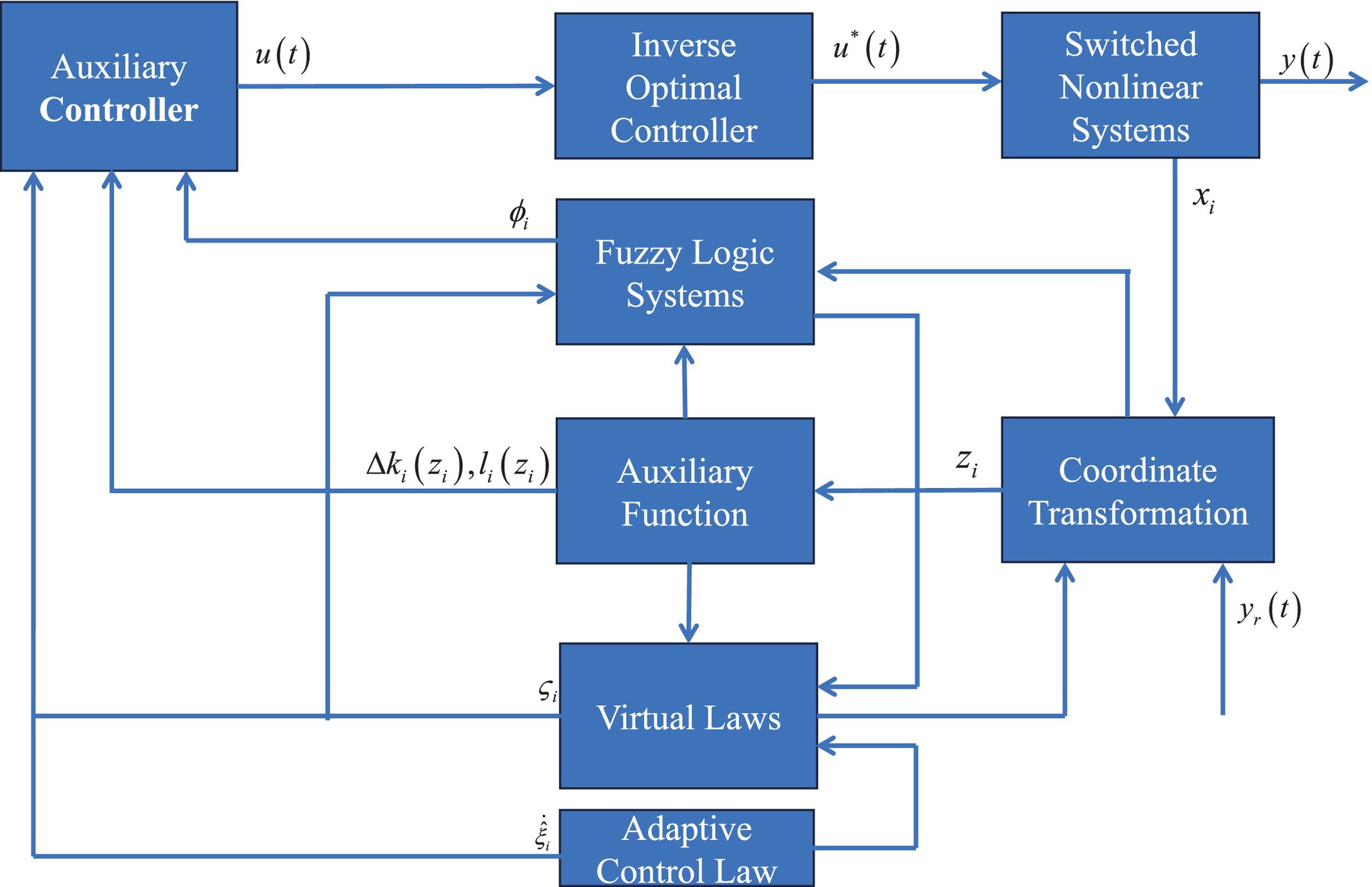
This paper investigates the switched nonlinear systems subject to mismatched disturbance and uncertain nonlinear function. The inverse optimization control method is employed to achieve the optimal performance of the system. Then, the predefined-time inverse optimal controller is designed based on the adaptive and fuzzy control theory, which can ensure the closed-loop systems are practically predefined-time stable while minimizing the cost function. Finally, the effectiveness and practicality of the paper are verified through a practical example.
Multi-Innovation Gradient Identification Methods for Bilinear Output-Error Systems
- Pages: 1569-1586
- First Published: 13 March 2025
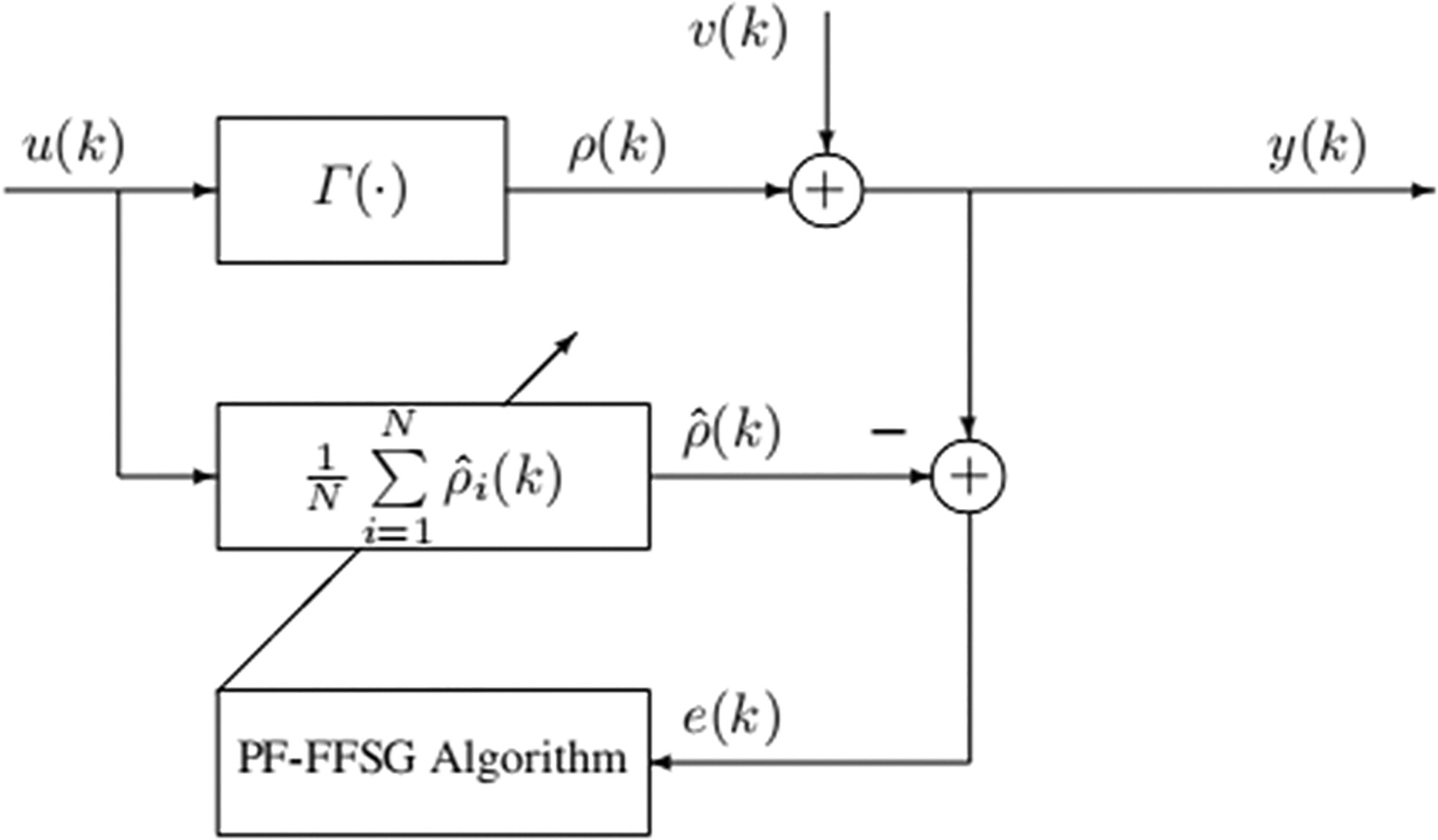
This article addresses the parameter estimation problems of bilinear output-error systems, and the auxiliary model identification idea and the particle filtering technique are adopted to overcome the identification obstacle resulting from the unknown true outputs. Then a particle filtering-based forgetting factor stochastic gradient algorithm is proposed for the identification of bilinear output-error systems. To enhance the convergence rate and accuracy of parameter estimation, we expand the scalar innovation to an innovation vector and develop a particle filtering-based multi-innovation forgetting factor stochastic gradient algorithm. Finally, a numerical example and a practical continuous stirred tank reactor process are provided to show that the discussed methods are work well. The results indicate that the proposed algorithms are effective for identifying the bilinear output-error systems and can generate more accurate parameter estimates than the auxiliary model-based forgetting factor stochastic gradient algorithm.
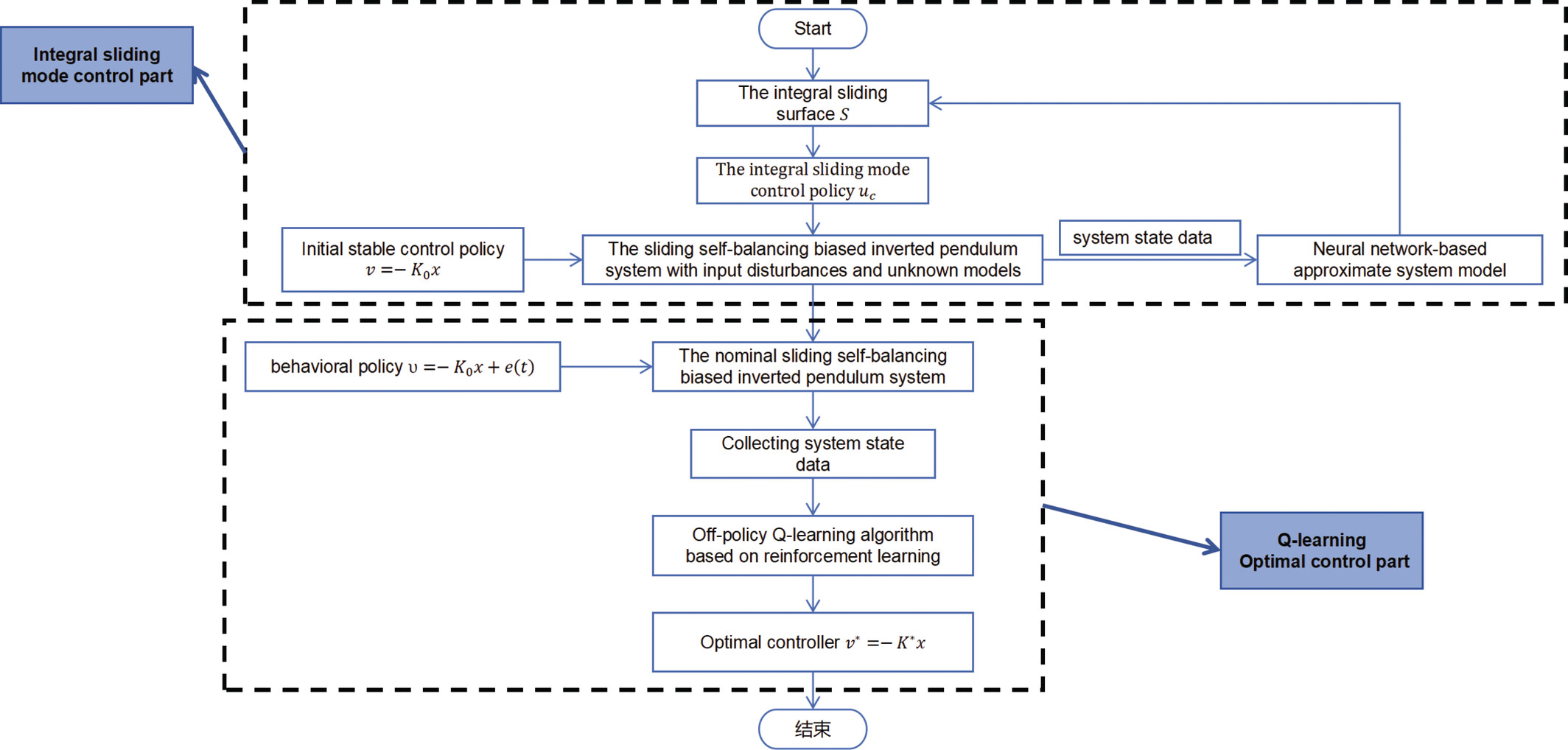
Optimal Control Method for Sliding Self-Balancing Biased Inverted Pendulum Based on Integral Sliding Mode
- Pages: 1587-1601
- First Published: 10 March 2025
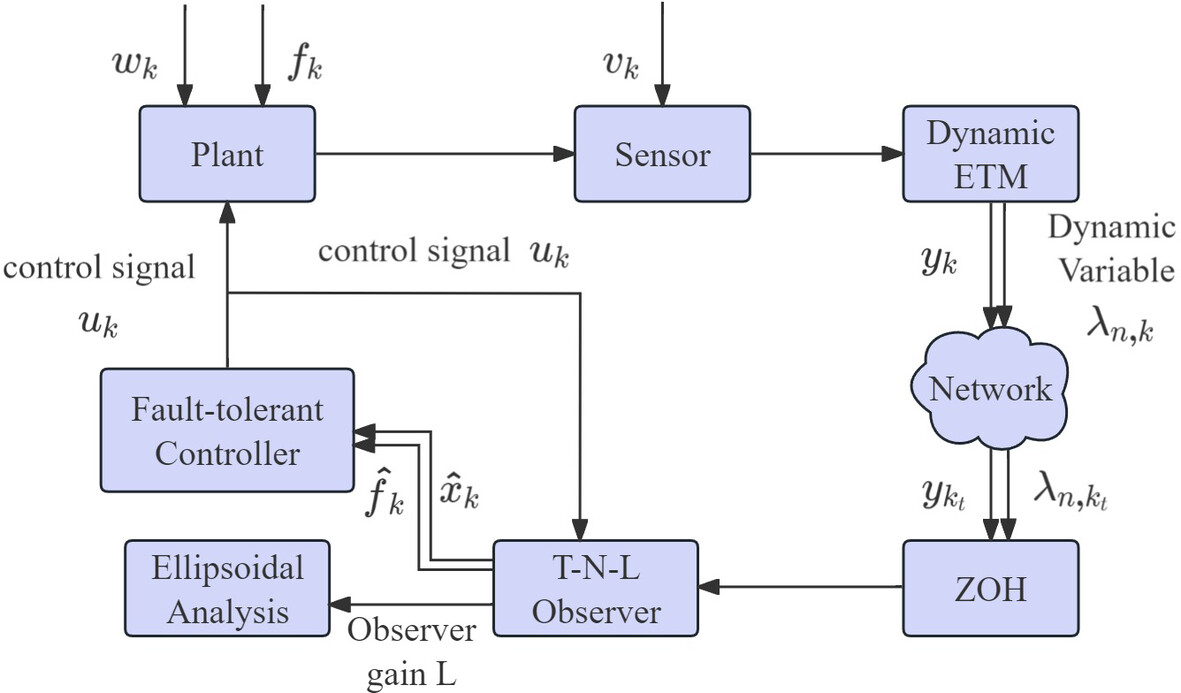
Event-Triggered Fault-Tolerant Control for Discrete-Time Linear Parameter-Varying System: An Ellipsoid Method
- Pages: 1602-1612
- First Published: 12 March 2025
Robust Sliding-Mode Fault-Tolerant Control for Discrete-Time Switched Singular Systems With Time-Delay
- Pages: 1613-1632
- First Published: 19 March 2025
This study proposes a fault-tolerant sliding-mode control strategy for discrete-time switched singular systems with time delays under arbitrary switching signals. By designing a sliding-mode surface and using Lyapunov-Krasovskii functions with Wirtinger-based inequalities, the approach ensures asymptotic admissibility and performance via linear matrix inequalities. A fault-tolerant sliding-mode control law is synthesized to maintain system stability within a bounded sliding-mode region and to maintain them thereafter. Numerical examples validate the method’s effectiveness and highlight its advantages over existing approaches.
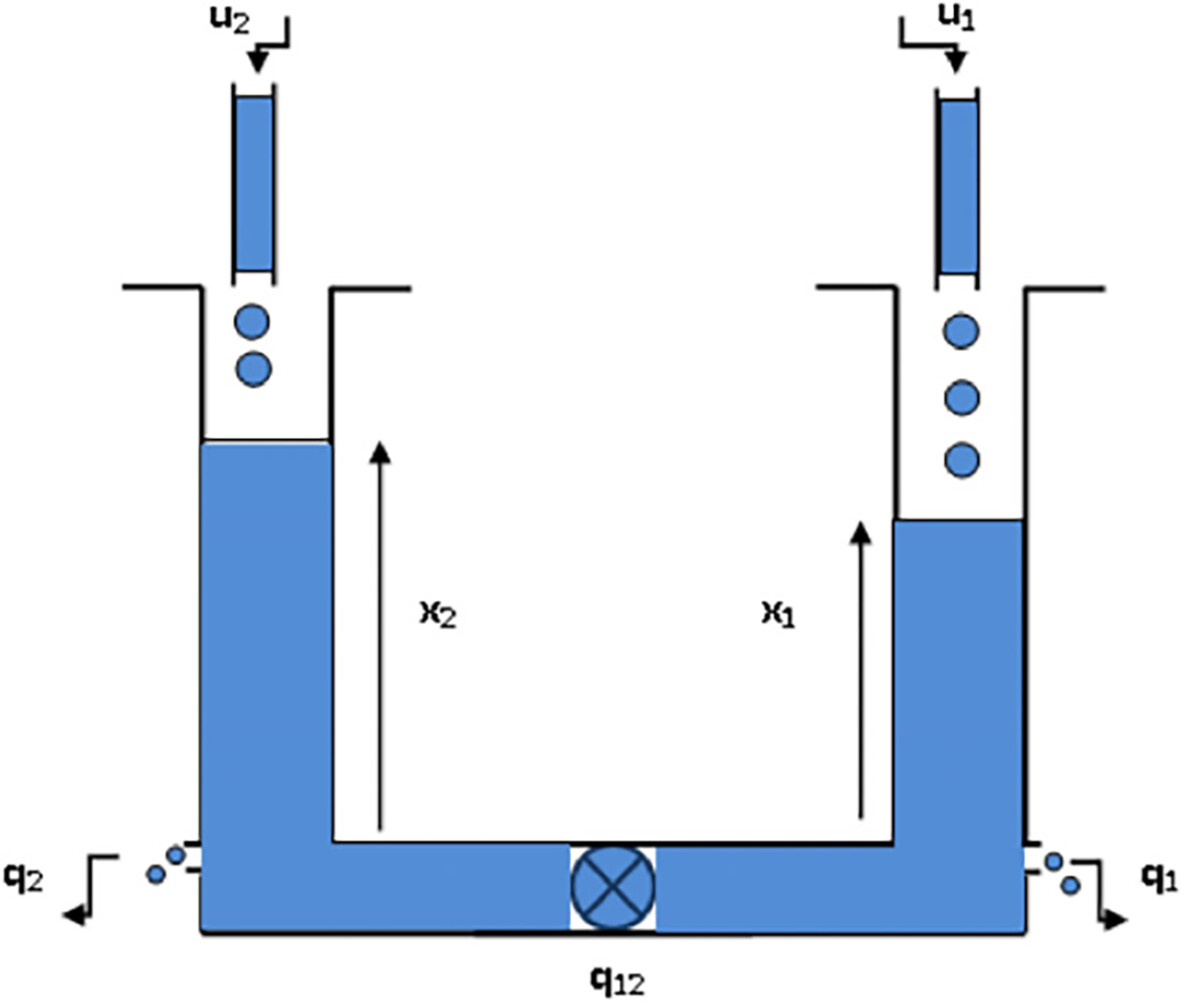
Recursive Filtering for Two-Dimensional Markov Jump Linear System With Time Correlated Multiplicative Noises and Energy Harvesting Constrains
- Pages: 1633-1649
- First Published: 20 April 2025
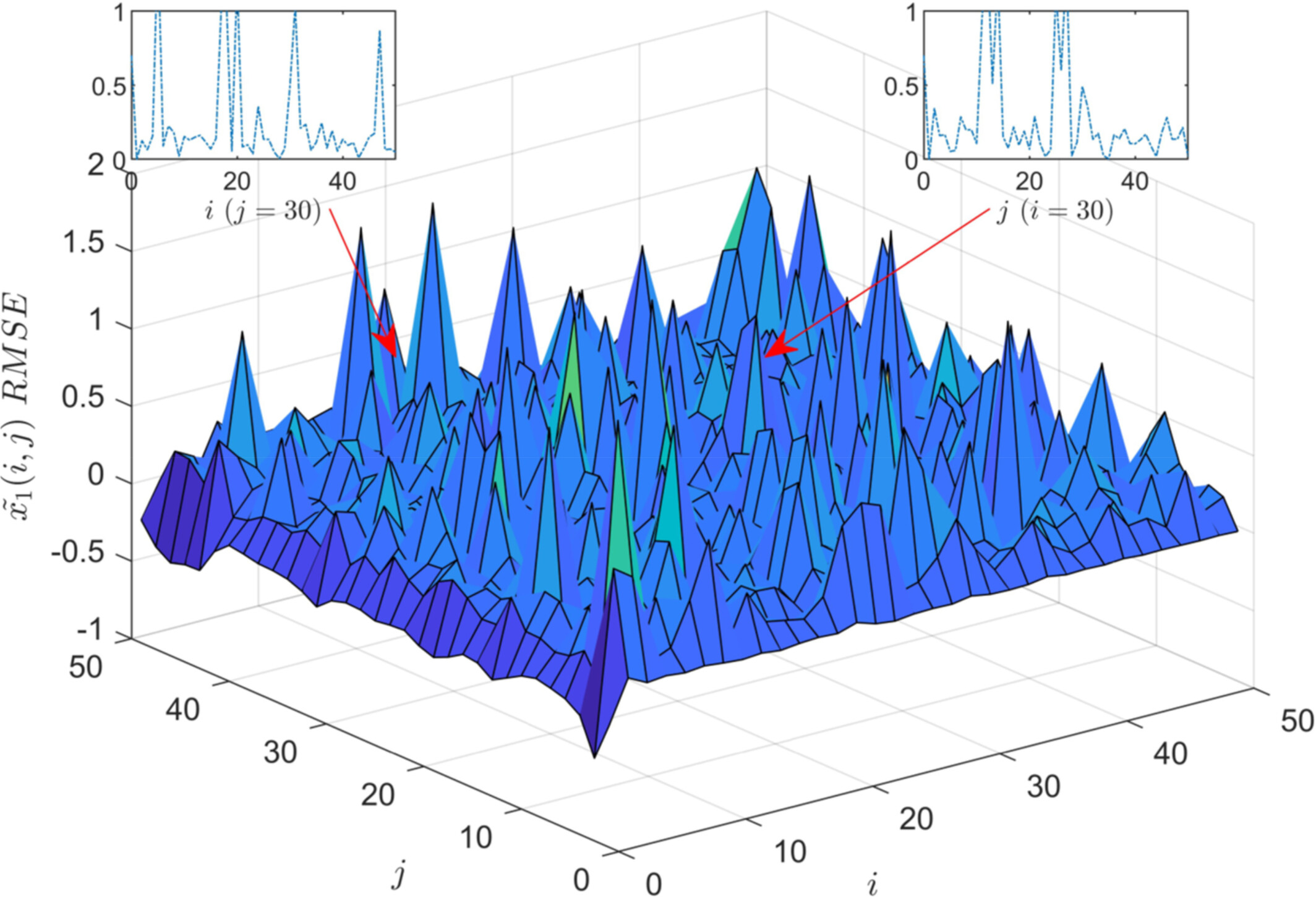
This paper investigates the linear minimum mean square error estimation for the two-dimensional Markovian jump linear system with time-correlated multiplicative noises and energy harvesting sensor. Two novel types of estimators with Markov jump parameters are designed by introducing several new terms, including the estimates for the product of multiplicative noise and state as well as the corresponding error covariance. The boundedness of the filtering error covariance with transition probability and probability distributions of the Markov chains is analyzed under natural assumptions.
A Chaotic Boost: The Chaotic Crayfish Optimization Algorithm for Superior Solution Quality
- Pages: 1650-1694
- First Published: 30 April 2025
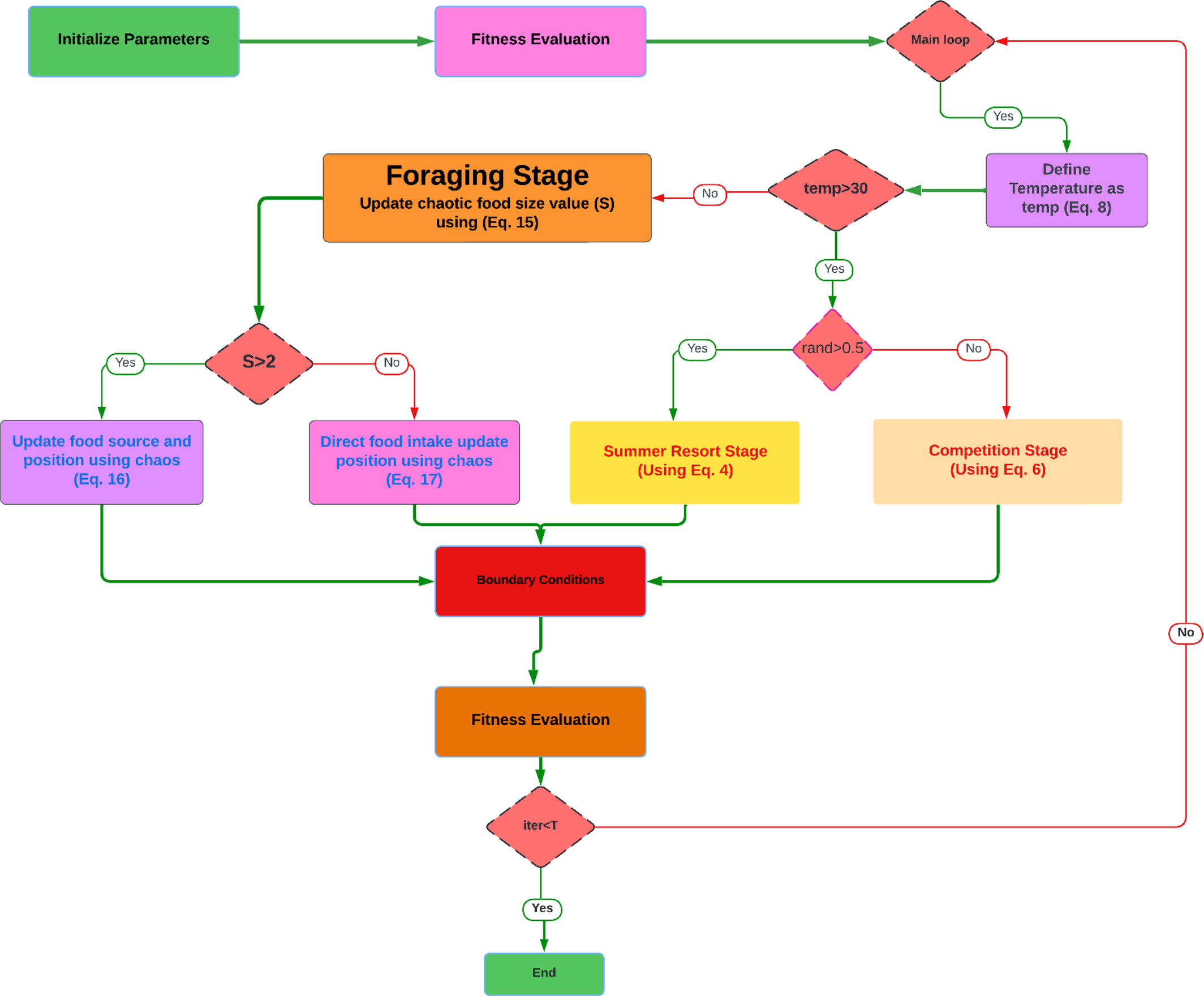
Flowchart of the CCOA.
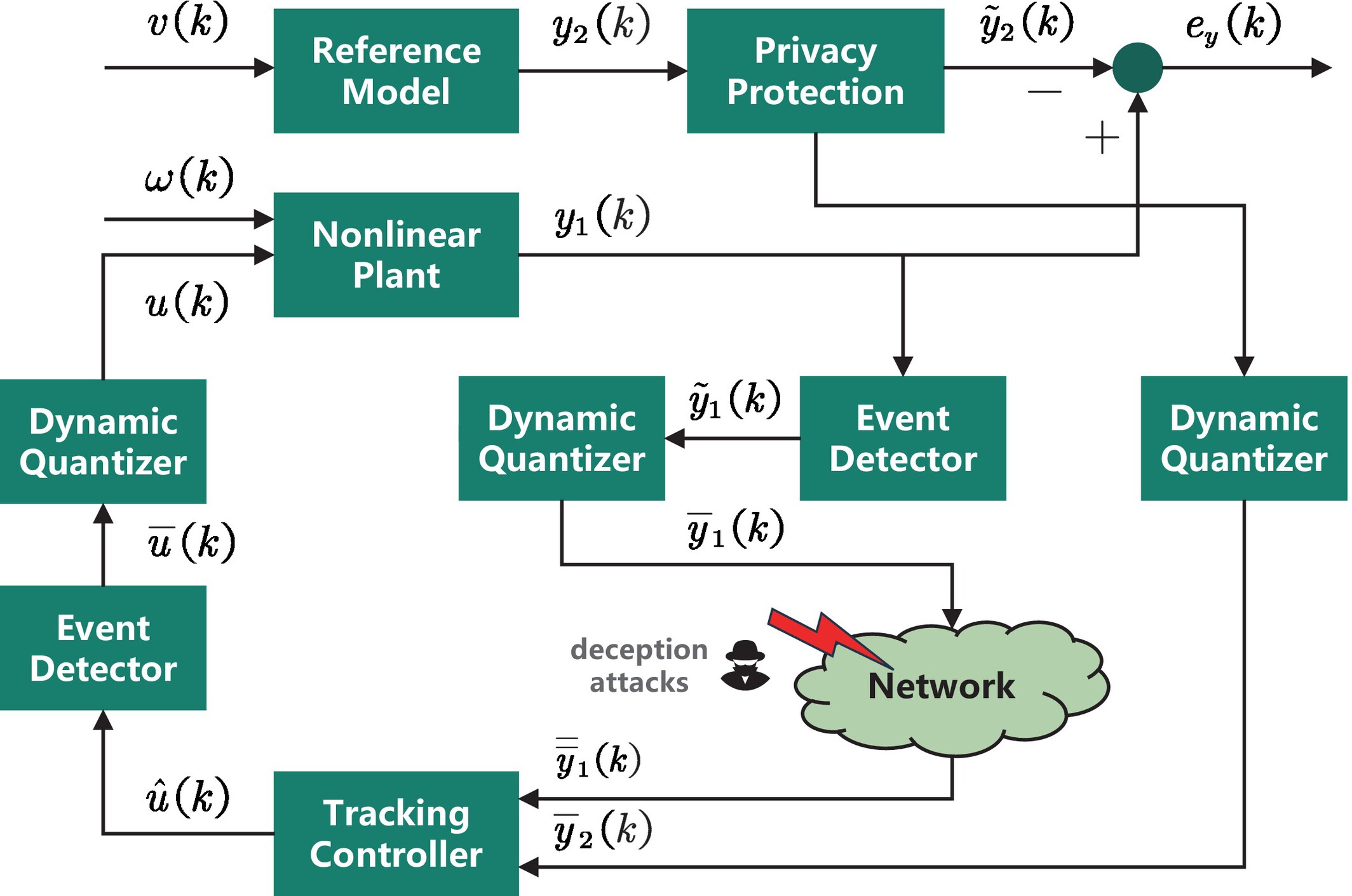
Tracking Control of Interval Type-2 Fuzzy Systems With Improved Adaptive Event-Triggered Mechanisms and Deception Attacks Under Privacy Protection
- Pages: 1695-1707
- First Published: 20 March 2025
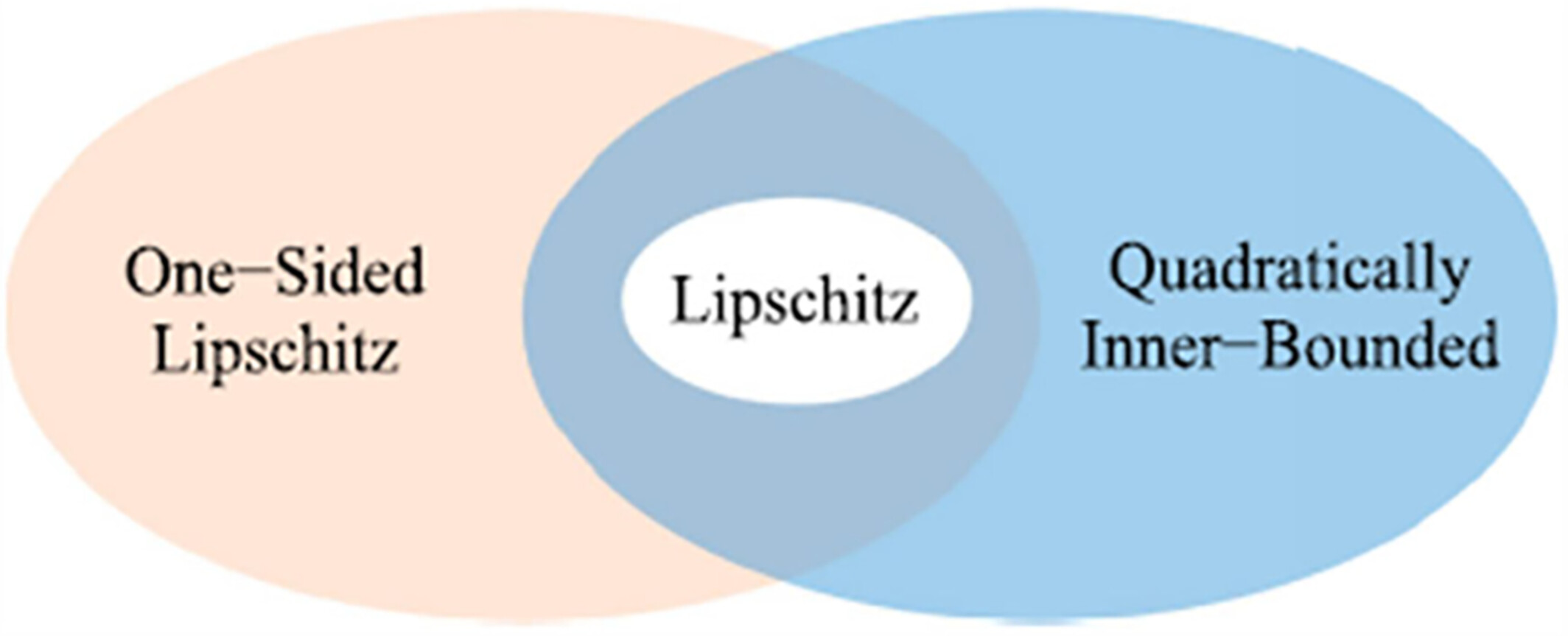
Observer-Based Control for a Class of One-Sided Lipschitz Uncertain Systems in Finite Frequency Domain
- Pages: 1708-1723
- First Published: 25 March 2025
Robust Model Predictive Control With Neural Ordinary Differential Equations for Nonlinear Systems
- Pages: 1724-1736
- First Published: 27 April 2025
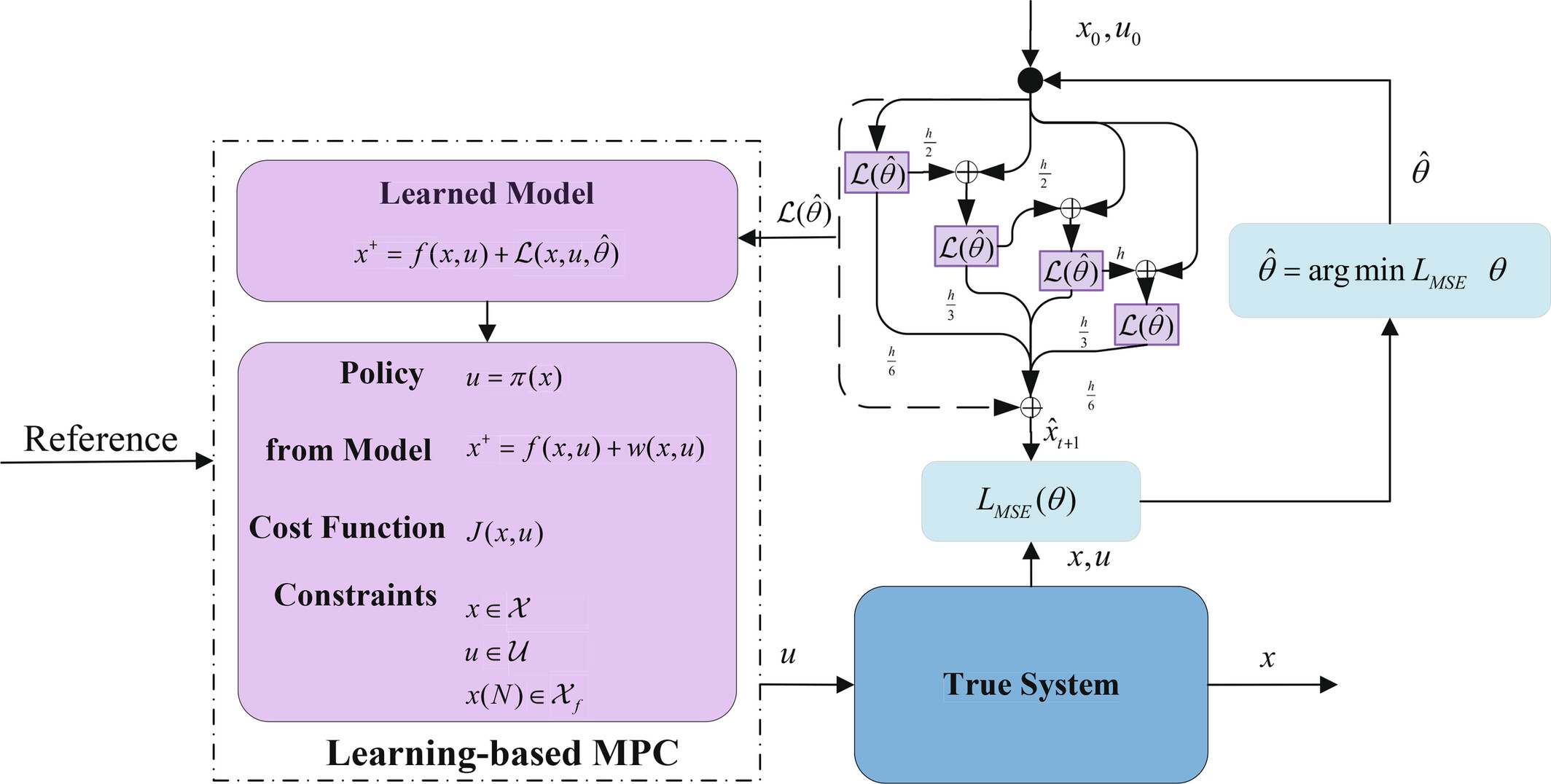
A novel Learning-based MPC framework utilizing Neural ODEs to address model mismatch in nonlinear systems. The approach combines residual modeling with first-principles uncertainty bounds, effectively decoupling safety and performance considerations. The online dynamic learning framework continuously refines model accuracy while maintaining recursive feasibility and stability with reduced memory requirements.
Stackelberg Game Approach to Mixed Stochastic Control for Mean-Field Jump-Diffusions Systems With Markovian Switching
- Pages: 1737-1758
- First Published: 15 April 2025
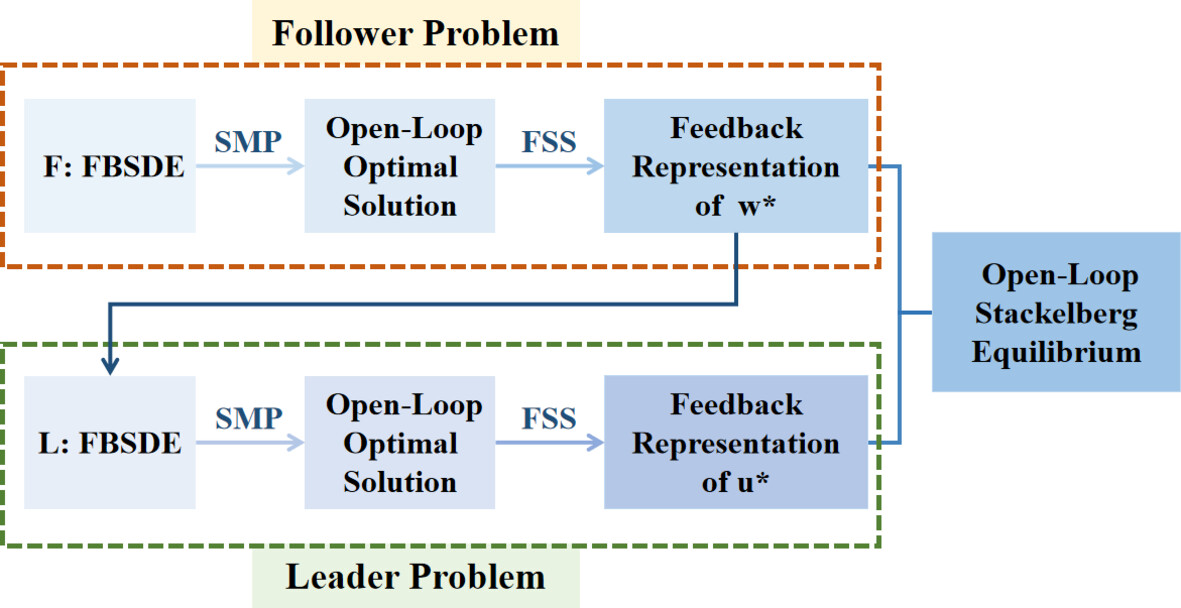
Technical Roadmap.
Fuel Consumption Optimization in Solid Oxide Fuel Cell Based Hybrid Electric Tractor Using Multihead Cross Attention and Sea-Horse Optimization
- Pages: 1759-1776
- First Published: 23 April 2025

Robust-Switched Model Predictive Control for a Class of Hybrid Rotors/Reaction-Wheels Driven In-Cabin Space Robots
- Pages: 1777-1788
- First Published: 21 April 2025
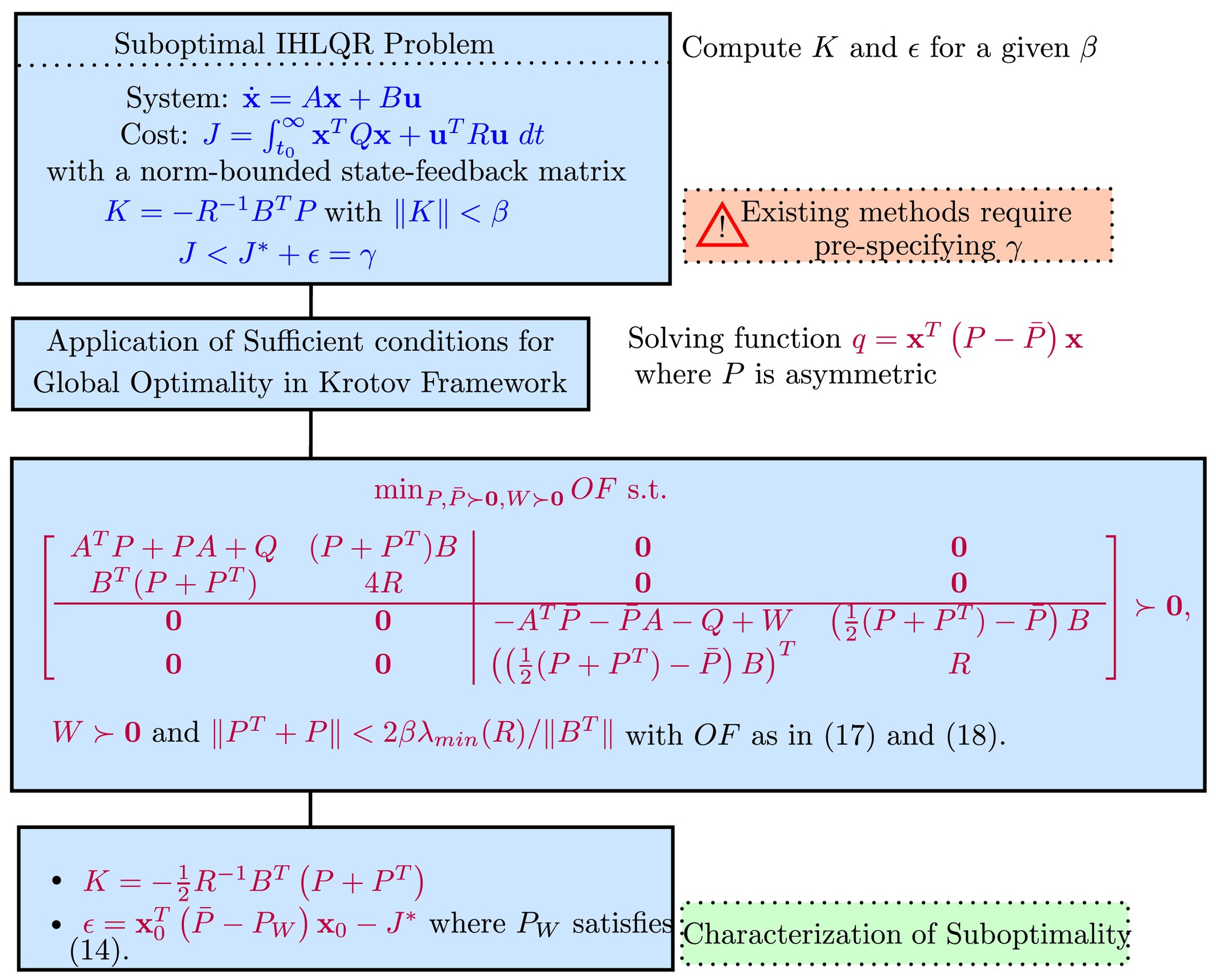
Characterization of Upper Bound on Cost for Linear Quadratic Problems With a Norm-Bounded Gain Matrix
- Pages: 1789-1799
- First Published: 21 April 2025
Optimal Trajectory Tracking Using Newton and Levenberg-Marquardt-Like Algorithms for Constrained Time-Varying Optimization
- Pages: 1800-1813
- First Published: 27 April 2025
New FOPID Control Design for Flight Dynamics With Special Phenomena
- Pages: 1814-1833
- First Published: 15 May 2025

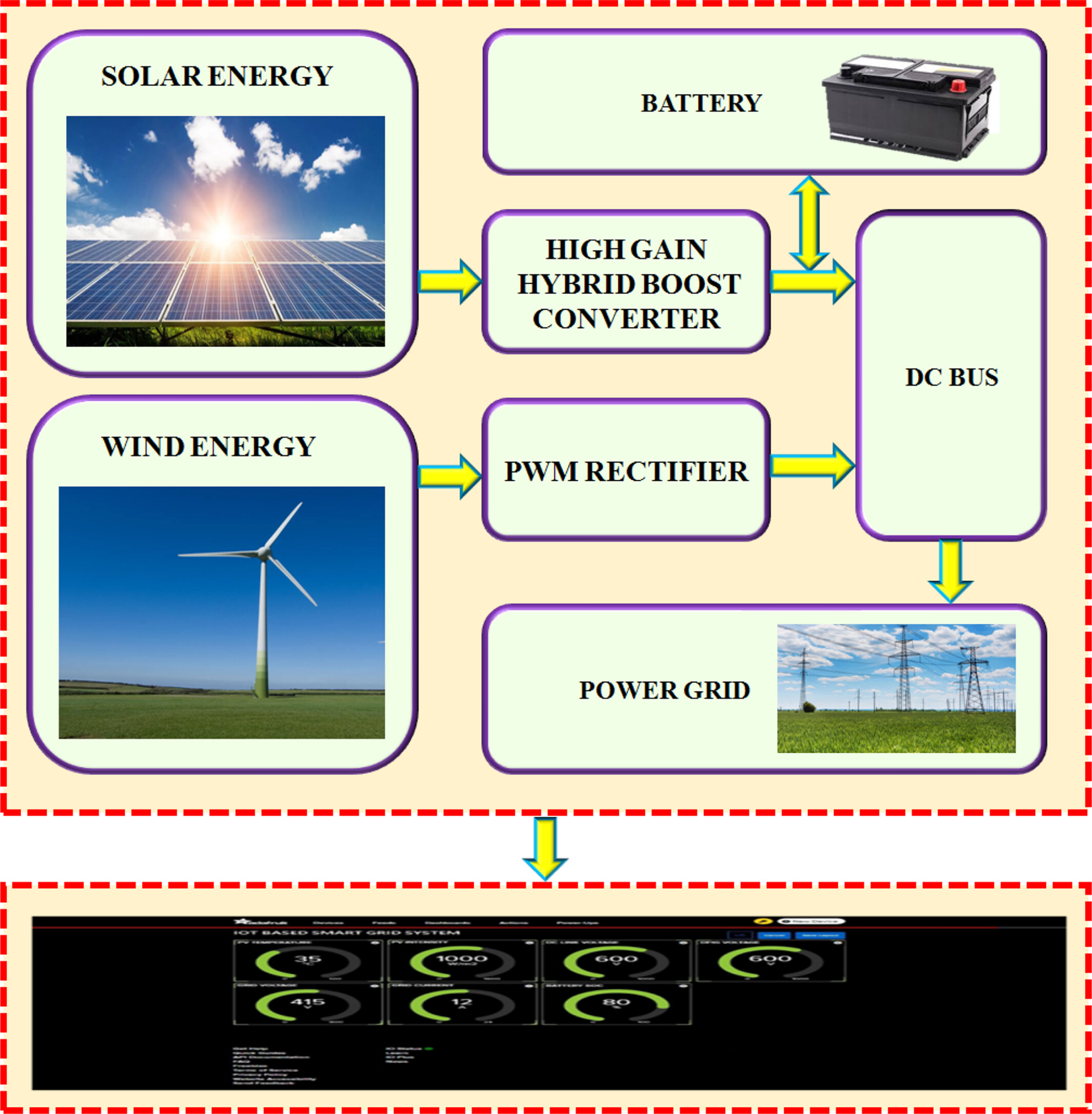
Innovative Strategies for Renewable Energy Integration and Smart Grid Power Management
- Pages: 1834-1854
- First Published: 08 April 2025
SHORT COMMUNICATION
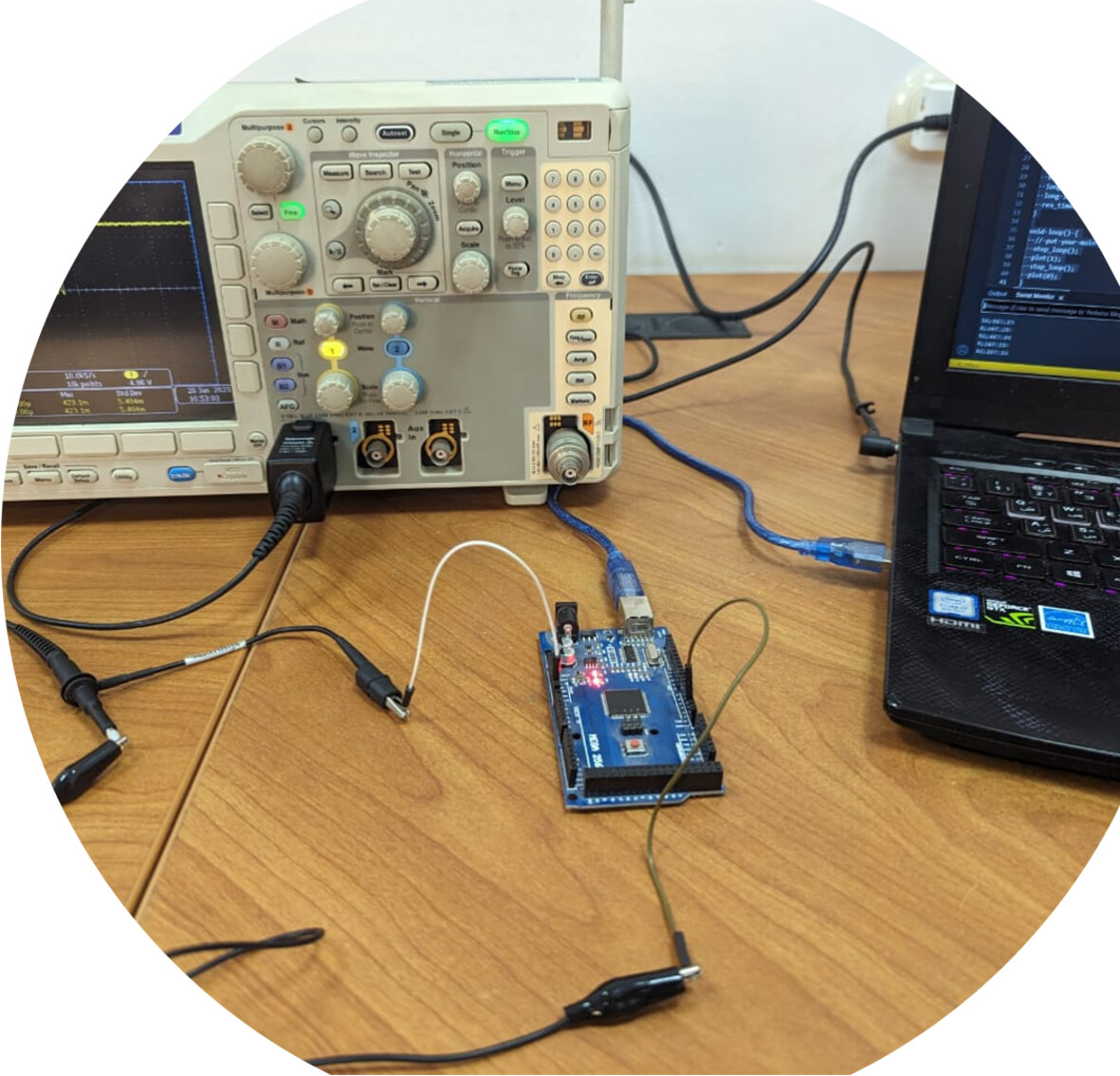
Prototyping Various MPPT Techniques Used in Wind Energy Conversion Systems for Response Time Monitoring
- Pages: 1855-1863
- First Published: 27 February 2025
Sign up for email alerts
Tools
More from this journal
Related Titles
 IssueVolume 39, Issue 7
IssueVolume 39, Issue 7Special Issue: AI and Machine Learning for Control Applications
July 2025Guest Editor(s):
Jiusun Zeng, Shaohan Chen, Xiaoyu Zhang, Chuanhou Gao
