

Nonlinear Stability and Convergence of Two-Step Runge-Kutta Methods for Volterra Delay Integro-Differential Equations
Abstract
This paper introduces the stability and convergence of two-step Runge-Kutta methods with compound quadrature formula for solving nonlinear Volterra delay integro-differential equations. First, the definitions of (k, l)-algebraically stable and asymptotically stable are introduced; then the asymptotical stability of a (k, l)-algebraically stable two-step Runge-Kutta method with 0 < k < 1 is proved. For the convergence, the concepts of D-convergence, diagonally stable, and generalized stage order are firstly introduced; then it is proved by some theorems that if a two-step Runge-Kutta method is algebraically stable and diagonally stable and its generalized stage order is p, then the method with compound quadrature formula is D-convergent of order at least min{p, ν}, where ν depends on the compound quadrature formula.
1. Introduction
Volterra delay integro-differential equations (VDIDEs) arise widely in the mathematical modeling of physical and biological phenomena. Significant advances in the theoretical analysis and in the numerical analysis for these problems have been made in the last few decades (see, e.g., [1, 2]). For the case of linear stability and convergence for these equations, numerical time-integration techniques of one-step collocation and Runge-Kutta type were investigated in [3–8]. Linear multistep-based methods were studied in [9–12]. De la Sen and Luo studied the uniform exponential stability of a wide class of linear time-delay systems in [13]; De la Sen considered the stability of impulsive time-varying systems in [14].
For the case of nonlinear stability and convergence, stability results were obtained in [15, 16], where the authors investigated the nonlinear stability of continuous Runge-Kutta methods, discrete Runge-Kutta methods, and backward differentiation (BDF) methods, respectively. However, most of these important results are based on the classical Lipschitz conditions, while the classical Lipschitz conditions are so strong that there are few equations satisfying them. Most of the Volterra delay integro-differential equations satisfy the one-sided Lipschitz condition, while the studies focusing on the stability and convergence of the numerical method for nonlinear VDIDEs based on a one-sided Lipschitz condition have not yet been seen in the literature. By means of a one-sided Lipschitz condition, we will discuss the stability and convergence of two-step Runge-Kutta (TSRK) methods for nonlinear VDIDEs in the present paper.
The paper is organized as follows. In Section 2, a fairly general class of VDIDEs is defined. We present a stability criterion for such problems, which generalizes the criteria in the above references. A class of two-step Runge-Kutta methods is also derived for solving VDIDEs. They are obtained by compound quadrature rules. In Sections 3 and 4, nonlinear stability and convergence of TSRK method for NDDEs are derived and proved. In Section 5 we present some numerical examples in order to illustrate the nonlinear stability and convergence of a two-step Runge-Kutta method. These numerical results show that the new methods are quite effective.
2. A Class of VDIDES and the Two-Step Runge-Kutta Methods
The class of Runge-Kutta methods with CQ formula has been applied to delay-integro-differential equations by many authors (c.f. [18, 19]). For the CQ formula (9), we usually adopt the repeated trapezoidal rule, the repeated Simpson’s rule, or the repeated Newton-cotes rule, and so forth, denote . It should be pointed out that the adopted quadrature formula (9) is only a class of quadrature formula for , there also exist some other types of quadrature formula, such as Pouzet quadrature (PQ) formula and the quadrature formula based on Laguerre-Radau interpolations [20, 21]. It is the aim of our future research to investigate the adaptation of PQ formula and the quadrature formula based on Laguerre-Radau interpolations to VDIDEs.
3. The Nonlinear Stability Analysis
3.1. Some Concepts
Definition 1 (see [22].)Let k, l be real constants, a TSRK method is said to be (k, l) algebraically stable if there exists a diagonal matrix D = diag(d1, d2, …, d2s) and a diagonal nonnegative matrix G such that M = (mij) is nonnegative, where
3.2. Numerical Stability of the Methods
Numerical stability is an important feature of an effective numerical method. An unstable numerical method may be consistent of high order, yet arbitrarily small perturbations will eventually cause large deviations from the true solution. In this section, we will focus on the asymptotic stability of the TSRK method.
Theorem 3. Assume that the TSRK method (7a)–(7c) is (k, l)-algebraically stable with 0 < k ≤ 1, suppose that the quadrature formula (9) satisfies the condition (14) and the conditions (2)–(4) hold, then, method (17a) and (17b) satisfies the following:
Proof. It follows from a fairly straightforward (but tedious) computation and (k, l) algebraically stability that (compare also [22, 23])
The proof of Theorem 3 is completed.
Theorem 4. Assume that a TSRK method (7a)–(7c) is (k, l)-algebraically stable with 0 < k < 1, then the TSRK method (7a)–(7c) with (9), (12) and (14) is asymptotically stable for the problem (1) with (2)–(4), when the following condition holds:
4. The Convergence of TSRK Method for NDDEs
4.1. Some Concepts
Definition 5. Method (7a)–(7c) with an approximation procedure (9) is said to be D convergent of order p if the global error satisfies a bound of the form
Definition 6. TSRK Method (7a)–(7c) is said to be diagonally stable if there exist a 2s × 2s diagonal matrix Q > 0 such that the matrix is positive definite.
Remark 7. The concepts of algebraic stability and diagonal stability of TSRK method are the generalizations of corresponding concepts of Runge-Kutta methods. Although it is difficult to examine these conditions, many results have been found, especially, there exist algebraically stable and diagonally stable multistep formulas of arbitrarily high order (cf. [24]).
Definition 8. TSRK Method (7a)–(7c) is said to have generalized stage order p if p is the largest integer which possesses the following properties.
For any given problem (1) and , there exists an abstract function Hh(t),
4.2. D-Convergence and Proofs
In this section, we focus on the error analysis of TSRK method for (1). For the sake of simplicity, we always assume that all constants hi, γi, di, and Li are dependent on the method, the bounds Mi, Ni, the parameters α, β, γ, σ, and τ.
Theorem 9. Suppose method (7a)–(7c) is diagonally stable, then there exist constants h1, p2, and p3 such that
Proof. Since the method (7a)–(7c) is diagonally stable, there exists a positive definite diagonal matrix Q such that the matrix is positive definite. Therefore, the matrix C11 is obviously nonsingular and there exists a l > 0 depends only on the method such that the matrix
Define
Theorem 10. Suppose the method (7a)–(7c) is algebraically stable for the matrices G and D, then for (36a), (36b), (51a), and (51b), one has the following:
Proof. Define u(n) = ζ(n) − ϖ(n), we get from (45a)–(45d) that
Theorem 11. Suppose the method (7a)–(7c) is diagonally stable and its generalized stage order is p, then there exist constants p5 and h2 such that
Proof. A combination of (36a) and (41a) leads to the following:
Theorem 12. Suppose method (7a)–(7c) is algebraically stable and diagonally stable and its generalized stage order is p. Then the method with quadrature formula (9) is D-convergent of order at least min{p, ν}.
Proof. A combination of (36b), (59b), and (53) leads to the following:
Considering ∥H(t) − Hh(tn)∥ ≤ p0hp, we obtain the following:
5. Numerical Experiments
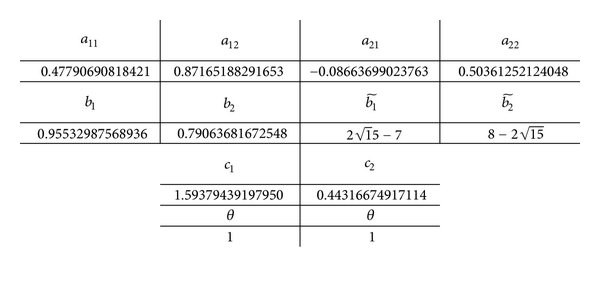
For Figures 1 and 2, it is obvious that the corresponding method for VDIDEs is stable and convergent, and the convergent order is min{4,4}.


6. Conclusions
This paper is devoted to the stability and convergence analysis of the two-step Runge-Kutta (TSRK) methods with compound quadrature formula for the numerical solution for a nonlinear Volterra delay integro-differential equations. Nonlinear stability and D-convergence are introduced and proved.
We believe that the results presented in this paper can be extended to other general DIDEs and NDIDEs. However, it is difficult to extend the results presented in this paper to more general delay differential equations; the discussion will be discussed later.
Acknowledgments
This work was supported by the Education Foundation of Heilongjiang Province of China (12523039) and the Doctor Foundation of Heilongjiang Institute of Technology (2012BJ27).

